Tam
Well-Known Member
I didnt read this thread. But AEB prevented me from running into the person in front of me in a three car accident.
Were your car on TACC (smart cruise) at that time also?



You can install our site as a web app on your iOS device by utilizing the Add to Home Screen feature in Safari. Please see this thread for more details on this.
Note: This feature may not be available in some browsers.
I didnt read this thread. But AEB prevented me from running into the person in front of me in a three car accident.
Were your car on TACC (smart cruise) at that time also?
Nope, traffic came to a stop, the car behind me stopped, but the car behind her decided to not stop. Rammed into us at about 40mph.
My car beeped and flashed, "warning applying emergency breaking" and stopped before hitting the car in front of me.
Could have been much worse.
AMAZING! Your case contradicts the title of this thread!
No one has thought to wonder why AEB only drops speed by 25mph. When there's no input from the driver, it just washes its 'hands' of the situation?
And no one has thought to wonder why the radar doesn't respond to stationary objects. I know it 'sees' them (it is doppler), but the system does nothing to mitigate them. It should at least activate the Red Alert. I was on the highway one night when some joker put a construction barrel in the middle of the lane -- I grabbed the wheel and tried to dodge, but hit it with my corner and the barrel smashed the right mirror.
And no one has thought to wonder why the radar doesn't respond to stationary objects. I know it 'sees' them (it is doppler), but the system does nothing to mitigate them. It should at least activate the Red Alert. I was on the highway one night when some joker put a construction barrel in the middle of the lane -- I grabbed the wheel and tried to dodge, but hit it with my corner and the barrel smashed the right mirror.
Lemme drop some science here. As a fighter pilot, we deal with radar and Doppler issues every day. Please read on if you’d like to know how this actually works.
It’s called a ‘Doppler notch’, and it’s physics. Simply, if you are driving at say 65 mph, the WORLD is rushing at the car at 65 mph. If Doppler was somehow ‘turned off’ the car would slam on the brakes immediately as it ‘sees’ the road, the tree, the light pole, that manhole cover, etc rushing towards it at 65 mph. To prevent this, engineers install a Doppler filter (same as in fighter jets) that basically ignores everything at the speed of the car. This is called a ‘notch’ in our parlance.
This is basic physics and radar theory. With the notch/filter in place, the car can now drive and essentially doesn’t see objects coming at it at the same speed as the car is traveling. Objects that a mph or two different than vehicle speed ARE seen due to Doppler effects, registered, and summarily avoided.
This is fact for all automakers with radar avoidance systems, as also explained in the article someone posted above.
Lemme drop some science here. As a fighter pilot, we deal with radar and Doppler issues every day. Please read on if you’d like to know how this actually works.
It’s called a ‘Doppler notch’, and it’s physics. Simply, if you are driving at say 65 mph, the WORLD is rushing at the car at 65 mph. If Doppler was somehow ‘turned off’ the car would slam on the brakes immediately as it ‘sees’ the road, the tree, the light pole, that manhole cover, etc rushing towards it at 65 mph. To prevent this, engineers install a Doppler filter (same as in fighter jets) that basically ignores everything at the speed of the car. This is called a ‘notch’ in our parlance.
This is basic physics and radar theory. With the notch/filter in place, the car can now drive and essentially doesn’t see objects coming at it at the same speed as the car is traveling. Objects that a mph or two different than vehicle speed ARE seen due to Doppler effects, registered, and summarily avoided.
This is fact for all automakers with radar avoidance systems, as also explained in the article someone posted above.
Yeah, the myth that automotive radar can't detect stationary objects has existed too long and is no longer applicable to modern radar.You are wrong. The physics for the radars you describe and those for automotive radars are the same, but the implementations for automotive use are not as you imagine. For proof, see the following illustration from here http://cdn.euroncap.com/media/1384/...13-0-a837f165-3a9c-4a94-aefb-1171fbf21213.pdf . These vehicles all responded to a stopped object ahead, including those with radar. Also, my own experience since the 1990s with automotive radar is that no automotive radar system ignores stationary objects in the expected path. To reduce false alarms, many of them wait after first detection for more confidence the object is not overhead or outside the lane, but even those react before collision. That's what defines today's "collision imminent braking" which very often uses radar. Also, here in the U.S., the Insurance Institute for Highway Safety tests vehicles with automatic emergency braking, including for braking for a stopped vehicle ahead, and many of those systems are radar-based -- and their tests show they work.
You are wrong. The physics for the radars you describe and those for automotive radars are the same, but the implementations for automotive use are not as you imagine. For proof, see the following illustration from here http://cdn.euroncap.com/media/1384/...13-0-a837f165-3a9c-4a94-aefb-1171fbf21213.pdf . These vehicles all responded to a stopped object ahead, including those with radar. Also, my own experience since the 1990s with automotive radar is that no automotive radar system ignores stationary objects in the expected path. To reduce false alarms, many of them wait after first detection for more confidence the object is not overhead or outside the lane, but even those react before collision. That's what defines today's "collision imminent braking" which very often uses radar. Also, here in the U.S., the Insurance Institute for Highway Safety tests vehicles with automatic emergency braking, including for braking for a stopped vehicle ahead, and many of those systems are radar-based -- and their tests show they work.
You are wrong. The physics for the radars you describe and those for automotive radars are the same, but the implementations for automotive use are not as you imagine. For proof, see the following illustration from here http://cdn.euroncap.com/media/1384/...13-0-a837f165-3a9c-4a94-aefb-1171fbf21213.pdf . These vehicles all responded to a stopped object ahead, including those with radar. Also, my own experience since the 1990s with automotive radar is that no automotive radar system ignores stationary objects in the expected path. To reduce false alarms, many of them wait after first detection for more confidence the object is not overhead or outside the lane, but even those react before collision. That's what defines today's "collision imminent braking" which very often uses radar. Also, here in the U.S., the Insurance Institute for Highway Safety tests vehicles with automatic emergency braking, including for braking for a stopped vehicle ahead, and many of those systems are radar-based -- and their tests show they work.
Yeah, the myth that automotive radar can't detect stationary objects has existed too long and is no longer applicable to modern radar.
In fact they advertise exactly that they can detect stationary objects:
"Independent mode for height measurement using an elevation antenna, enabling the system to reliably classify obstacles and brake safely, even when the object is stationary"
Long-range radar sensor
The most recent 79GHz radar with higher bandwidth can even detect the shape of a stationary car, a pedestrian near a car, whether doors are open or not:
https://pdfs.semanticscholar.org/152d/3c733cccd528c26b6afd91a43738acbff688.pdf
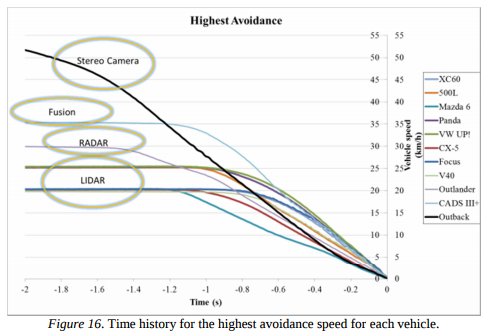
Did you read the study? ALL of the cars tested were using LIDAR, with one car using Radar only, and one car using a fusion system of multiple sensors.
Radar came out with better performance than LIDAR.
ALL cars were UNABLE to stop and avoid a collision above 25 or 30 kph. With the exception of the fusion stereo system car. Read that again.
Here’s a summary from the actual study. “One RADAR-only system has been tested and was found to offer higher speed avoidance (up to 30km/h) than any of the LIDAR systems but this had no mitigation effect at higher speeds. Two multiple sensor systems were tested and both offered greater performance than either LIDAR or RADAR alone. The stereo camera system was most effective, with full avoidance from test speeds of up to 50km/h.”
Then why didn't it work in Florida or with the fire truck or for me about 2 weeks ago when I had to intervene?
Heh, my first job as a software/firmware engineer was literally to fact-check suppliers in the context of the auto industry. I would read things with enticing marketing claims just like what you're doing here, order the part, and attempt to build a prototype demonstrating the ability in order to help this unnamed system integrator supplier select which parts to use.
I have to say, the success rate is pretty much the same as weight loss infomercial products. I would strongly caution against reading into specific marketing claims and confusing that with a productized system. The Bosch radar sensor used in AP1.0 and AP2.0 has the same claim, that there's a tall radar beam and wide radar beam for eliminating overpasses and hence enabling stationary radar braking. But judging by how much AP1 and AP2 slammed on the brakes back when radar-only-braking was more active, I'm guessing it didn't work out of the box super well.
I do agree that radar technology could theoretically deal with stationary objects through advanced signal processing, but I honestly still doubt anything on the market actually works like that.
Please see my answer in post #56 in this thread to a similar point by chillaban.Pure science, Doppler notch.
Even the study concluded, if you are above 25-30 kph...no system will detect and stop. The engineers HAVE to factor in Doppler notch and force the radar to not see objects coming at the car at the same speed the car is traveling...or we’d have thousands of false stops.
Sorry -- I only addressed one of your three questions. After the Florida accident, Musk tweeted that the radar saw the crossing tractor-trailer but mistook it for an overhead object. Tesla addressed that issue with their "fleet learning for radar" introduced with software version 8.0.Someone claiming to know the driver posted on Reddit that the Tesla was following another vehicle, and the driver couldn't see the fire truck until the lead vehicle swerved into another lane. The driver reportedly said he didn't have time to avoid the collision, and wasn't sure whether his Tesla did any braking. If that report is largely correct, then when the details are finally reported I bet they will show that the Tesla's systems responded as quickly as the radar's view of the fire truck was not blocked, including automatic braking. Many people seeing the crash photographs have commented that a crash from the reported original speed of 65 mph should have been more severe. My suspicion is that automatic braking -- perhaps in addition to the driver's braking -- reduced speed before the crash.
If, when the details become public, we learn there was an unobstructed view of the fire truck, then I'm also puzzled why the Tesla would not have responded.
Sorry -- I only addressed one of your three questions. After the Florida accident, Musk tweeted that the radar saw the crossing tractor-trailer but mistook it for an overhead object. Tesla addressed that issue with their "fleet learning for radar" introduced with software version 8.0.
What were details of your situation "about 2 weeks ago when I had to intervene", and what version of Tesla software did your vehicle have?
I have to ask... Let's say they generate a GPS map of all the overhead road signs to ignore but what if a large vehicle is disabled on the travel lane right beneath the overhead sign that is marked as a false positive. Will the vision then kick in to activate emergency braking overriding the radar false positive?

