I don't think we'll be able to tell how many cameras EAP actually uses at this time, but we might be able to gather some more useful info. OP can you run a few more experiments for us?
While keeping the side cameras blocked out (4 of them, the fenders and B-pillars), can you do the following:
1. Block out the rear camera, the wide camera (center), and the drivers side camera [leaving only the passenger]
2. Block out the rear camera, the wide camera (center), and the passenger camera [leaving only the driver]
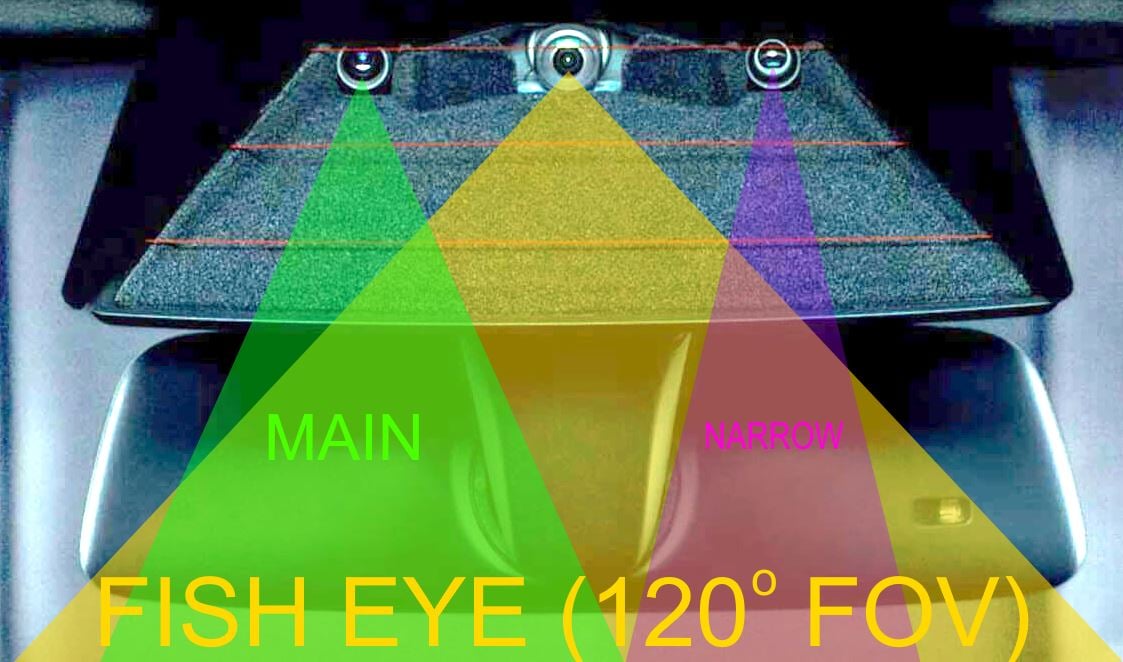
I think this will tell us which camera is the main camera.
Another thing to try, is to change lanes only the front 3 cameras active. Does it allow you to change lanes? How good is it at detecting cars in the neighboring lanes? (if the answer is it sucks more than usual, we would then know they side cameras are used)