Curious as to how many of the camera on the new Model S are actually being used at the moment so I decided to do some testing today.
I started by first covered in the side fender cameras. This has zero effect on Autopilot and it worked as if they were not covered.
I then covered the side B pillar cameras. Again, zero effect on Autopilot.
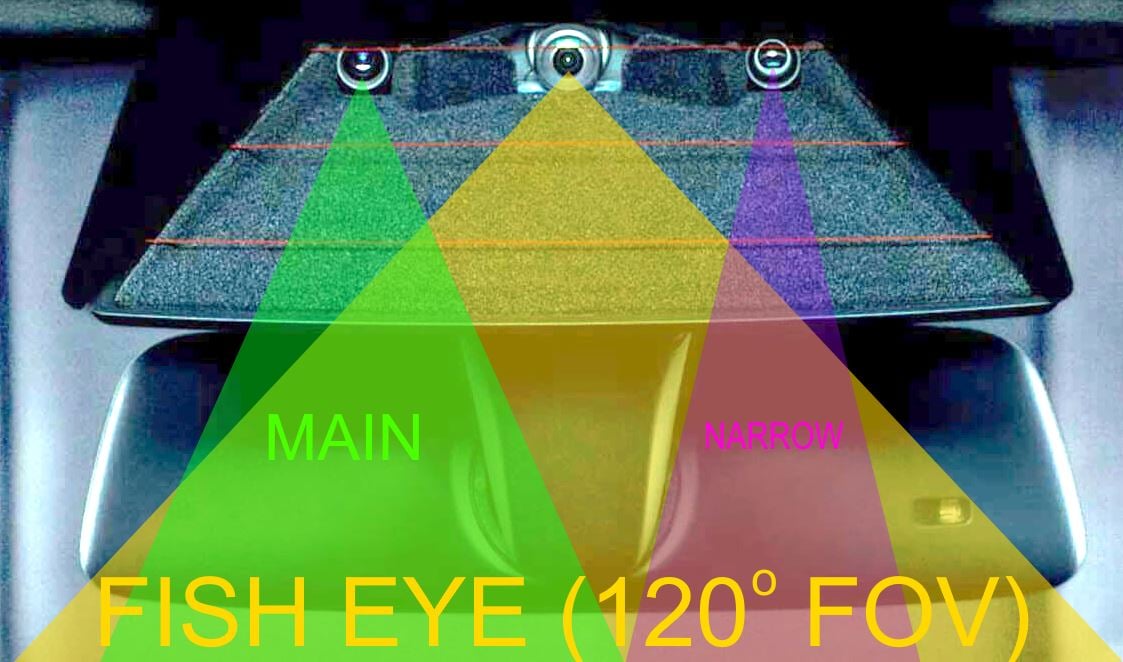
I then covered the windshield drivers side camera. Again no effect and no error warning.
Next I covered the windshield passenger side camera and finally started to see an effect. The Autopilot steering wheel icon kept appearing and disappearing. I was able to engage Autosteer but it was pretty erratic.
I finally covered all cameras and Autosteer would not work at all, as expected. The odd thing was that the visual lanes would still pop in and out of view on the display but the AP steering wheel icon never appeared.




I started by first covered in the side fender cameras. This has zero effect on Autopilot and it worked as if they were not covered.
I then covered the side B pillar cameras. Again, zero effect on Autopilot.
I then covered the windshield drivers side camera. Again no effect and no error warning.
Next I covered the windshield passenger side camera and finally started to see an effect. The Autopilot steering wheel icon kept appearing and disappearing. I was able to engage Autosteer but it was pretty erratic.
I finally covered all cameras and Autosteer would not work at all, as expected. The odd thing was that the visual lanes would still pop in and out of view on the display but the AP steering wheel icon never appeared.