


Wasn’t sure where to post this so I made a megathread for future reference.
Navigate on Autopilot will now (in version 2018.48.1) suggest that you lane change out of the passing lane on highways:
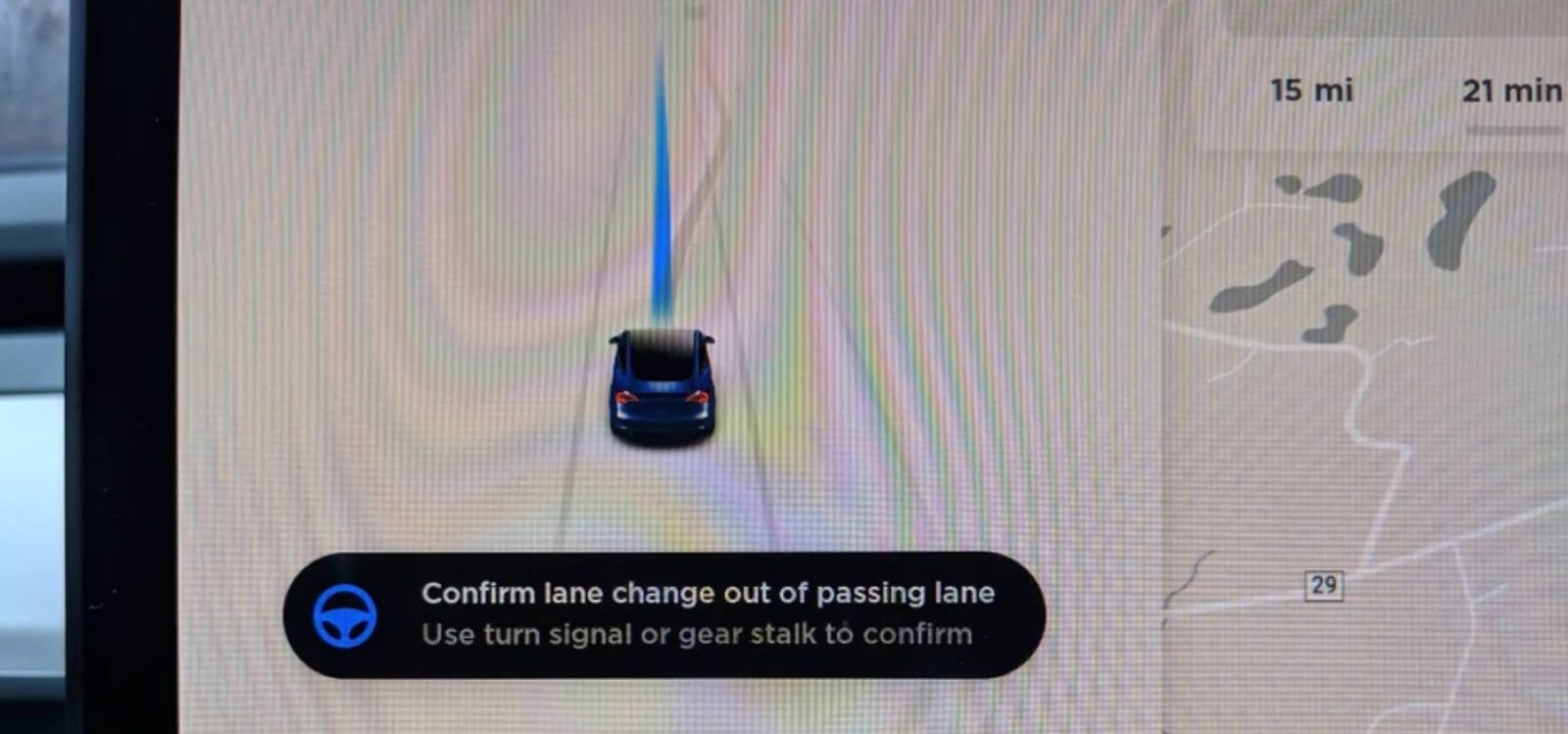
Source: Electrek and u/ahatzz11 on r/teslamotors
Navigate on Autopilot will now (in version 2018.48.1) suggest that you lane change out of the passing lane on highways:
Source: Electrek and u/ahatzz11 on r/teslamotors
