stopcrazypp
Well-Known Member
I think we are talking past each other. All the examples in response to you come with the caveat of assuming no frictional/heat losses, in which case integrating force over distance is exactly the same result in both cases of acceleration. For example, in the slow acceleration case, say the force is 50 and distance required to accelerate to a given velocity is 50 (made up numbers). In the fast acceleration case it'll be something like 100 and 25, with 250 as the end result of both. After you reach the target speed the energy consumption is 0 (so it's not a factor).As Brass Guy points out, average speed over the drive cycle is higher with quicker acceleration. This has to require more energy to cover the distance than for slower acceleration. Not in outer space, but on Earth it does. If you integrate force over distance it takes more Nm, ft-lbs, kWh, or whatever your favorite energy units are.
GSP
I took the kinetic energy approach, ItsNotAboutTheMoney completely derived the formula for kinetic energy straight from your example of integrating force over distance, and others described it with conservation of energy.
Of course if you consider frictional losses, there will always be additional losses, but how significant is not that clear.
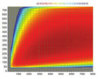
I did some math about the frictional losses from the higher average speed. The assumptions I made is 0-60 in 10.6 (acceleration of a Prius C, one of the slowest cars in the US market) vs 0-60 in 4.2 (acceleration of P85) and a target speed of 60mph (for easier math). From the graph from the following Tesla blog, I got 193Wh/mi for 30mph and 287Wh/mi for 60mph.
http://www.teslamotors.com/blog/model-s-efficiency-and-range
My results show only 6Wh more is used:
| 0-60 | dist to 60mph (ft) | dist after 60mph (ft) | Wh to 60mph | Wh after 60mph | Wh Total |
| 10.6 | 466.4 | 0 | 17 | 0 | 17 |
| 4.2 | 184.8 | 281.6 | 7.7 | 15.3 | 23 |
- - - Updated - - -
The same distance doesn't matter. This is because in the theoretical friction-less case (which is what most people are talking about here), traveling a distance at a certain set velocity doesn't use any energy. Only the acceleration part uses energy.From my perch, it seems the misunderstanding here wasn't reaching the same velocity, but the same distance.
Last edited: