So Cruise is basically Waymo five years ago.Internal employee email from Mo Elshenawy details a more scaled back plan for relaunching Cruise. This includes pausing production of Origin and only relaunching in 1 city and proving performance in 1 city first before scaling:



Welcome to Tesla Motors Club
Discuss Tesla's Model S, Model 3, Model X, Model Y, Cybertruck, Roadster and More.
Register
Install the app
How to install the app on iOS
You can install our site as a web app on your iOS device by utilizing the Add to Home Screen feature in Safari. Please see this thread for more details on this.
Note: This feature may not be available in some browsers.
-
Want to remove ads? Register an account and login to see fewer ads, and become a Supporting Member to remove almost all ads.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Cruise
- Thread starter hooty
- Start date

diplomat33
Average guy who loves autonomous vehicles
So Cruise is basically Waymo five years ago.
Yep. And I think we have a better picture now of how Cruise tried to go too fast. They thought they could scale to dozens of cities when they are basically 5 years behind Waymo. Their tech was not ready for that level of scaling yet. So they basically got slapped back to where they really should have been all along.
Tam
Well-Known Member
So Cruise is basically Waymo five years ago.
Two years ago, Waymo got stuck in traffic cones.
This year, Cruise not only got stuck in traffic cones but also in wet cement!
For the traffic cone problem, Cruise is only 2 years behind.
I think Waymo fixed their problems daily while Cruise would push to expand even though its employees warned about children pedestrian issues.
Cruise made basic rookie mistakes as if it's a Tesla: Choosing the wrong lane in good conditions. It was driving straight on the second lane from left, then it turned left and got rear-ended by the backhoe on the first lane on the left.
I don't think you can really single out a single thing like "traffic cones" and think "two years".Two years ago, Waymo got stuck in traffic cones.
This year, Cruise not only got stuck in traffic cones but also in wet cement!
For the traffic cone problem, Cruise is only 2 years behind.
I think Waymo fixed their problems daily while Cruise would push to expand even though its employees warned about children pedestrian issues.
Cruise made basic rookie mistakes as if it's a Tesla: Choosing the wrong lane in good conditions. It was driving straight on the second lane from left, then it turned left and got rear-ended by the backhoe on the first lane on the left.
It's hard to say if it's two years or five years or more.
When I am looking at the tech (Waymo develops their own Lidar and other sensors because they couldn't (and can't) buy them on the market), the driving, the org and strategy like engaging with local communities and general rolling out efforts such as education of first responders and other stakeholders it just seems more like a "holistic effort" compared to Vogt's, which seems more "move fast (scale up, gain market share) and break things" (ie humans) and "fake it til you make it" style approach. For safety critical applications like AV:S or medical applications, I think Waymo's approach is going to win.
I don't know Cruise as well, but clearly they aren't anywhere near what's required, both in terms of getting interventions/call-home down and getting to a higher level of safety (that's not the same thing in unsupervised autonomy).
Tesla have no idea when their system will fail, and they don't care, since they have no near term plans (say the coming three years) of removing supervision. Perhaps this decade for Tesla, but probably not using the current sensor suite. If "more data" was the solution, Tesla would be in the lead. They aren't. They aren't even competing at the moment.
Source:

The End of Starsky Robotics
In 2015, I got obsessed with the idea of driverless trucks and started Starsky Robotics. In 2016, we became the first street-legal vehicle…
 medium.com
medium.com
Last edited:
EVNow
Well-Known Member
Question - does Waymo (and Cruise earlier) have a way for the passenger to call and tell the remote operators that the car is stuck ? I guess they do ... don't know whether the passengers don't call or remote operators can't help.Two years ago, Waymo got stuck in traffic cones.
This year, Cruise not only got stuck in traffic cones but also in wet cement!
stopcrazypp
Well-Known Member
Yes they do, there's been plenty of videos posted of passengers (including journalists) interacting with CS. The problem is the remote operators can only issue prompts to the car, they can't directly remote control it. So in the end, if the car is too confused, the prompts don't work (and they have to send someone to physically rescue it).Question - does Waymo (and Cruise earlier) have a way for the passenger to call and tell the remote operators that the car is stuck ? I guess they do ... don't know whether the passengers don't call or remote operators can't help.
Given the recent huge difference between disengagement vs intervention stats, the cynic in me says they don't add the remote control capability because it would count as a disengagement (whereas a prompt won't).
EVNow
Well-Known Member
So, their remote operator is not useful. That is NOT what a remote operator should be able to do.Yes they do, there's been plenty of videos posted of passengers (including journalists) interacting with CS. The problem is the remote operators can only issue prompts to the car, they can't directly remote control it. So in the end, if the car is too confused, the prompts don't work (and they have to send someone to physically rescue it).
Quite possible.Given the recent huge difference between disengagement vs intervention stats, the cynic in me says they don't add the remote control capability because it would count as a disengagement (whereas a prompt won't).
Again shows why lax regulations are bad for the society. There are always CEOs willing to risk (others' lives) for personal benefit. Can't believe so many have been brain-washed into thinking we should let companies do whatever they want with little to no regulation.
I think this is the beginning of a real bromance. Is @EVNow a European at heart? Too bad he can't see this. Also ban FSDb. /jk.Again shows why lax regulations are bad for the society. There are always CEOs willing to risk (others' lives) for personal benefit. Can't believe so many have been brain-washed into thinking we should let companies do whatever they want with little to no regulation.
Tam
Well-Known Member
Again shows why lax regulations are bad for the society. There are always CEOs willing to risk (others' lives) for personal benefit. Can't believe so many have been brain-washed into thinking we should let companies do whatever they want with little to no regulation.
CA traffic law needs to issue moving traffic tickets to driverless cars (they can still issue parking but not moving tickets in driverless cases).

Driverless cars immune from traffic tickets in California under current laws
An NBC Bay Area investigation reveals autonomous vehicles in California cannot be cited for moving traffic violations since transportation laws require tickets to be issued to actual “drivers.”
 www.nbcbayarea.com
www.nbcbayarea.com
Doggydogworld
Active Member
Move fast and break bones......compared to Vogt's, which seems more "move fast (scale up, gain market share) and break things" (ie humans)
No. Riders can call "customer support" who are a completely separate group from the remoteQuestion - does Waymo (and Cruise earlier) have a way for the passenger to call and tell the remote operators that the car is stuck ?
Waymo has bureaucratic names for each group, but I can never remember them. Cruise has different names for the same groups. Tesla doesn't need any of these groups, because their cars drive perfectly. As soon as the next FSD version comes out.....
Last edited:
voyager
Active Member
The problem is the remote operators can only issue prompts to the car, they can't directly remote control it. So in the end, if the car is too confused, the prompts don't work (and they have to send someone to physically rescue it).
Given the recent huge difference between disengagement vs intervention stats, the cynic in me says they don't add the remote control capability because it would count as a disengagement (whereas a prompt won't).
So, basically (a bit simplified):
diplomat33
Average guy who loves autonomous vehicles
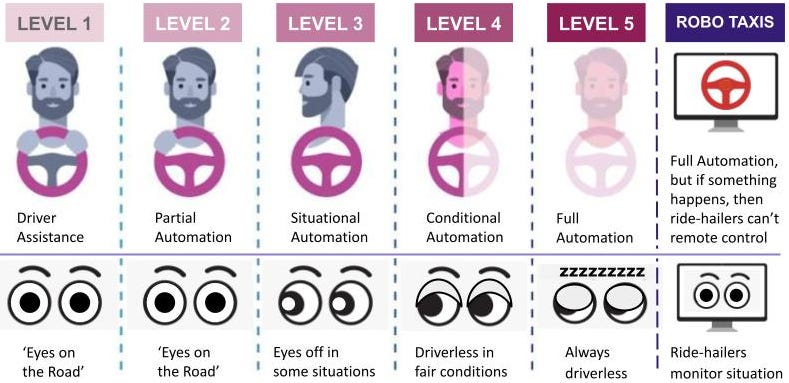
So, basically (a bit simplified):
I don't like that the graph makes it look like robotaxis are a separate level after L5. Robotaxis are also level 4. They are not a separate level.
It is also odd that they say the ride-hailer monitors the situation. The ride-hailer does not monitor the situation, they are just the passenger. The remote operator can monitor the situation but they are not the ride-hailer.
Tam
Well-Known Member
I agree with @diplomat33 on Robotaxis.So, basically (a bit simplified):
In 2012, a legally blind man rode a driverless car and did not monitor the driving.
It's now 11 years later, that Robotaxis' description for a blind man to watch the road is outdated.
voyager
Active Member
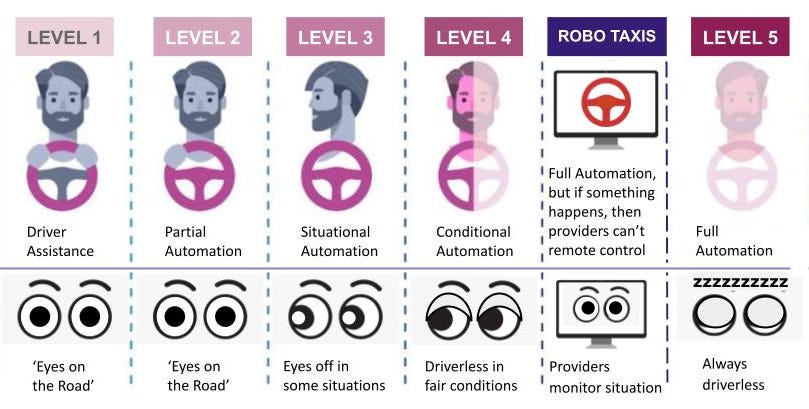
Thx for the comments. I guess this is a bit better. Cruise etc. don't constitute an extra stage or phase,
but I tried to convey that providers like Cruise try to squeeze themselves in the whole development of having automated personal mobility.
but I tried to convey that providers like Cruise try to squeeze themselves in the whole development of having automated personal mobility.
The simplified pictograms imply that in L4, one has to pay some attention and may have to take over. As @diplomat33 pointed out, Robotaxis are L4 - so the extra Robotaxi column is actually complicating your chart. The customer (Robotaxi passenger) is never expected to drive the vehicle, but the same it can be said of a true L4 personal car.
The reason it's "only" L4 is that there are some situations in which it may not be able to complete the trip. This can be due to a number of factors, including map geofencing, weather conditions, traffic conditions, unusual local events or hardware failure.
(Noting that L5 basically means that none of the above can defeat the vehicle, unless the situation would have defeated a human operator also. Almost by definition, this requires artificial general intelligence and still may be unattainable unless the car can do things like send out a robot to clear away debris, change its own tire, open a cattle gate or negotiate with animals and humans in the path. So L5 is widely considered to be an unrealistic or aspirational level.)
(Also noting, for useful L3, napping or extended eyes-off is not out of the question. L3 can be like a chauffeur on the highway for example, but maybe not in town. An L3 vehicle will still have human operable controls.)
True, it's very common that people view L4 as "I can take over but I shouldn't need to very often". Because most people discussing it have a driver's license and a personal car, so that's the way they're thinking about it. But in fact, a major use case for L4 is for people who cannot drive for one reason or another. (I'm very conscious of this because I expect this to be my case upcoming.) In any event, the real useful L4 will indeed be nap-time or back-seat passenger compatible. In the case of an L4 commercial Robotaxi, the fleet operator probably doesn't want any passenger intervention in any circumstances. So the L4 vehicle does not have to have human operable controls. Again though, the same can be true of a personal L4 vehicle; there's no fundamental distinction.
It's important to stress that the ODD limitations of L4/rlRobotaxi are not necessarily due to sudden unforeseen events, nor to solimple geofence restrictions. In many if not most such cases, the L4 inability to drive would be identified or predicted problems, before the drive even starts. These would come from known upcoming weather, road construction or closures, vehicle charge/fuel state and so on.
So as I've argued before, in those cases the car will decline the trip request, or at least warn the requestor that there is a realistic chance of a delay or an inability to complete the trip (usually solved by turning back or going somewhere else, but in the worst cases perhaps getting stranded and requiring outside assistance). For a personal L4 car, I believe that the threshold of acceptable trip-completion risk would and should be up to the passenger or guardian. For a fleet Robotaxi, the commercial entity won't be eager to take the responsibility ahd onsequences of a failed ride, so the acceptable trip-completion risk threshold would be lower.
Back to your chart: I'm not against the idea of simplified diagrams, but for this one I'm not sure I can suggest an alternate set of pictograms that impart the correct information. As you've already found in your second edit, it probably needs more of simplified text and less of somewhat ambiguous pictograms or symbols.
I'm also not saying I love the whole SAE levels paradigm, but it's what we have. Alternatives are proposed from time to time, but none I've seen are so unambiguous that they would end the endless discussions!
diplomat33
Average guy who loves autonomous vehicles
Thx for the comments. I guess this is a bit better. Cruise etc. don't constitute an extra stage or phase,
but I tried to convey that providers like Cruise try to squeeze themselves in the whole development of having automated personal mobility.
Still got to disagree. Robotaxis are not a level in between L4 and L5. Robotaxis are L4. Robotaxis are just a specific application of L4. For example, you can have L4 consumer cars, L4 delivery trucks, L4 robotaxis, L4 semi trucks etc... They are all L4, they are not a separate level. You are mixing in a type of vehicle in with the levels as if the type of vehicle were its own level when it is not.
Cruise did not try to squeeze in between the levels, they tried to deploy L4. Their L4 was just not good enough for regulators and the public. Their L4 required too much human assistance, especially in some safety critical cases. And Cruise tried to jump to the driverless stage when they really still needed safety drivers. So their driverless got shut down.
Mobileye has proposed a "eyes on", "eyes off", "driverless" taxonomy like your graph. Mobileye defines "eyes on/hands on" as a human is in the driver seat and must keep both their hands on the wheel and their eyes on the road at all times, "eyes on/hands off" means the human in the driver seat does not need to hold the steering wheel but must still keep their eyes on the road at all times, "eyes off/hands-off" means there is a human in the driver seat but they are not required to hold the wheel or keep their eyes on the road and "driverless" is defined as no human in the driver seat. So "eyes on" and "eyes off" relate to consumer cars and "driverless" relates to robotaxis (and perhaps a future consumer car with no steering wheel or pedals).
Note that they do have robotaxis (driverless) as a separate column like your graph does. It is just not matched to specific SAE levels since there is no easy direct correlation.

Read more: Defining a New Taxonomy for Consumer Autonomous Vehicles | Mobileye Opinion
IMO, this taxonomy does a good job of showing when a system would need human assistance or remote assistance. For "eyes on", the human in the driver seat is responsible for both safety and non-safety minimum risk maneuvers. For both "eyes off" and driverless, the autonomous driving system would be responsible for the full safety minimum risk maneuvers. But for "eyes off", the human would be responsible for non-safety minimum risk maneuvers and for driverless, tele-operations would be responsible for non-safety minimum risk maneuvers.
Last edited:
Tam
Well-Known Member
I don’t think you described the facts that:Thx for the comments. I guess this is a bit better. Cruise etc. don't constitute an extra stage or phase,
but I tried to convey that providers like Cruise try to squeeze themselves in the whole development of having automated personal mobility.
L3 and below still mandates a licensed driver.
Above L3, no human drivers needed.
Mercedes L3 allows drivers to be eyes-off hands-off but the drivers have to be able to drive when L3 conditions are no longer met such as when the system detects blaring siren from an ambulance coming from behind.
L4 and above requires no drivers even when it encounters an ambulance...
Your inclusion of human picture with 2 halves in color is not reflecting the fact that a blind man can ride in an L4 with no human drivers needed.
L4 portion in your presentation needs to delete the human participation.
FloridaJohn
Member
I don’t think you described the facts that:
L3 and below still mandates a licensed driver.
Above L3, no human drivers needed.
Mercedes L3 allows drivers to be eyes-off hands-off but the drivers have to be able to drive when L3 conditions are no longer met such as when the system detects blaring siren from an ambulance coming from behind.
L4 and above requires no drivers even when it encounters an ambulance...
Your inclusion of human picture with 2 halves in color is not reflecting the fact that a blind man can ride in an L4 with no human drivers needed.
L4 portion in your presentation needs to delete the human participation.
Just to add on that L4 and L5 do not need a human in the car at all. Think of the situation where a robotaxi has just dropped off a fare and is enroute to the next fare. Or your L4 personal car has just dropped you off at work and then goes to find a parking spot.
diplomat33
Average guy who loves autonomous vehicles
Just to add on that L4 and L5 do not need a human in the car at all.
There is a caveat for L4: a vehicle with L4 would not need a human in the car but only if it was restricted to stay inside the L4 ODD. If the vehicle wanted to go outside the L4 ODD then it would necessarily need a human in the car to drive since the L4 cannot operate outside its ODD. Remember that L4 is defined as autonomous driving in a limited ODD. Depending on the ODD and the purpose of the vehicle, it might need to go outside its L4 ODD. Robotaxis don't need a human in the car since they always stay inside their geofence. So they always stay inside their L4 ODD. Likewise, in your example, if your L4 personal car were geofenced, then it would not need a human in the car. But if you wanted to go outside the geofence, then the L4 personal car would need a human in the car. Also, a personal car with L4 that is limited to interstate highways would need a human in the car for when they are not driving on highways, like city streets.
Just an observation: L3 is the only mode that can leave the ODD without stopping as it has a hand-over protocol. The L4 would have to stop.There is a caveat for L4: a vehicle with L4 would not need a human in the car but only if it was restricted to stay inside the L4 ODD. If the vehicle wanted to go outside the L4 ODD then it would necessarily need a human in the car to drive since the L4 cannot operate outside its ODD. Remember that L4 is defined as autonomous driving in a limited ODD. Depending on the ODD and the purpose of the vehicle, it might need to go outside its L4 ODD. Robotaxis don't need a human in the car since they always stay inside their geofence. So they always stay inside their L4 ODD. Likewise, in your example, if your L4 personal car were geofenced, then it would not need a human in the car. But if you wanted to go outside the geofence, then the L4 personal car would need a human in the car. Also, a personal car with L4 that is limited to interstate highways would need a human in the car for when they are not driving on highways, like city streets.
Similar threads
- Replies
- 14
- Views
- 132
- Replies
- 7
- Views
- 195
- Replies
- 22
- Views
- 1K
- Article
- Replies
- 615
- Views
- 13K