I'm not sure I'd call "we hope to have scaled solutions by 2024" solved.
If it is then I guess FSD has been solved for a while
")
I say it is solved because their approach addresses every problem and works at scale:
1) They crowdsource the maps so they have a way of collecting the data at scale
2) The maps are detailed enough to work for AVs
3) They are creating and updating the maps at scale
Are Mobileye maps the same as Waymo's? I imagine they are fairly different.
Also I imagine the maps Google have generated for Google maps (which do not have to detail all the road furniture) also are very different from the ones that Waymo is generating and using for their fleet currently (which do include all the road furniture).
Yes, MB's maps and Google Map's are different from Waymo's maps.
Google Maps are not HD as far as I know. They are basically just navigation maps.
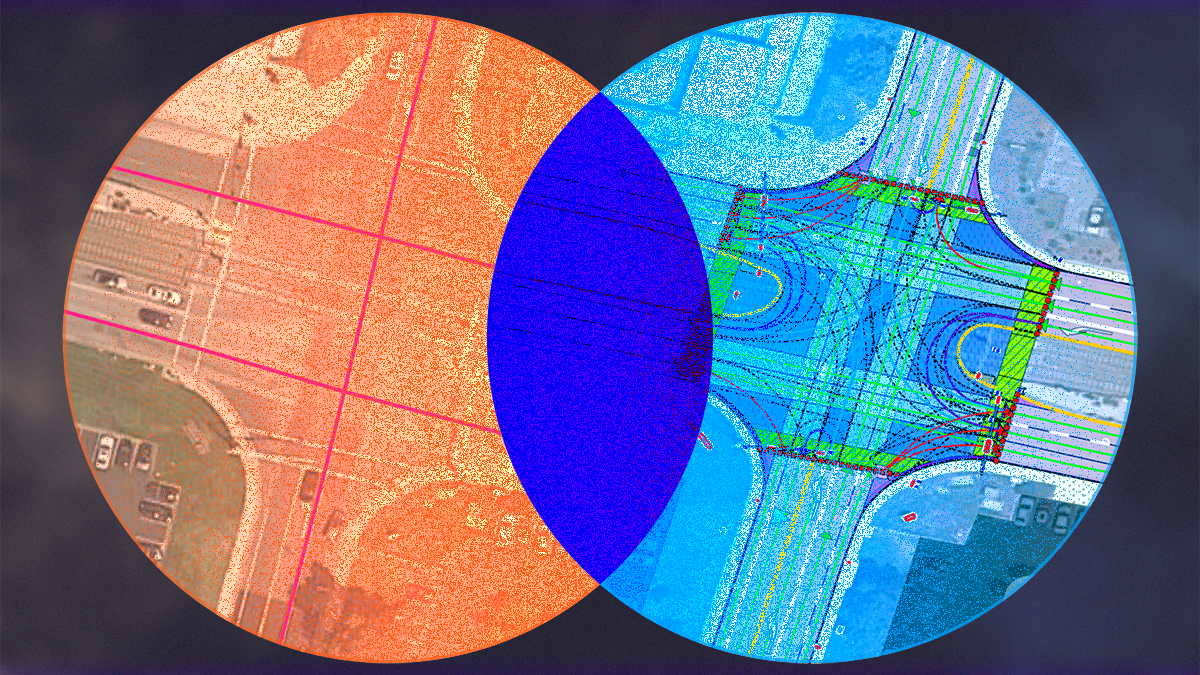
MB's maps are generated entirely with camera vision only. Waymo's maps are generated with lidar.
MB's maps are still accurate and detailed but with less features than Waymo's HD maps which are incredibly accurate and with a lot of features.
There is basically a trade off. The more detailed and accurate the map is, the more helpful it will be for AVs, but the harder it will be to scale since it will take longer and cost more. So the question is what level of accuracy and detail is still good enough for reliable AVs but still cost effective to scale. In other words, what is that "middle ground"? MB believes they have found that middle ground.
EDIT: Waymo is sticking with their super HD maps because they want to focus on accuracy and detail of the map in order to make the robotaxi safer. Since they are doing ride-hailing in 50-100 sq mi areas, they don't need super large scale maps. So they are prioritizing detail and accuracy of the maps over size of the maps. However, Waymo has greatly improved the speed and cost of creating and updating their HD maps by automating as much of the process as possible.
You can read more about Waymo's HD maps here:
For any emerging technology to be trusted, it helps to first be understood. In the past, people could see how their cars worked, looking under the hood and tinkering with them with the help of a user manual. In 2020, vehicles have so much technology that they’ve become difficult for the general...

blog.waymo.com
You can read more about the different types of maps here:
A high falutin’ title to convey how maps are converging and fidelities blending toward a new “medium definition” steady state.

medium.com