f205v
Member
hahah LOL! no it was totally my fault. My only excuse is that I'm not a native English speaker, and sometimes writing words with the same pronunciation but different spelling makes me go dizzy!



You can install our site as a web app on your iOS device by utilizing the Add to Home Screen feature in Safari. Please see this thread for more details on this.
Note: This feature may not be available in some browsers.
3. Provide a sensor that will disable acceleration if it sees an object directly ahead. So even if the driver "unintentionally" hits the accelerator pedal, it won't work.
Sorry to hear about the accident in your new car. Reading your description, I can't believe the Tesla sales guy let me try to park an X in my house's tight parking spot during the test drive. I was so stressed out at the time. I had to let him take over.Hi folks, I'm a new Tesla Model S owner and hence new to this forum. I picked up my brand new Model S a few weeks ago and the next day rammed it into my garage wall. IMHO all this talk about sudden unintended acceleration is all baseless. Here's what I believe happened in my case: I drove the car home (35 miles) after taking delivery and safely parked it in my 2-car garage. The next morning, I pulled it out onto the driveway and started going through the Control settings. The lady at the delivery center had spent about 10 minutes in "orientation", saying that "it's very intuitive and you'll be up and running in no time". So I went through the controls and made some changes. No one told me what "Creep" was, so I turned it off. Then I saw that Acceleration was on "Chill". Not knowing what that meant I switched it to "Standard" which seemed appropriate. So now I'm easing the car back into the garage, and the sensors are showing (in orange) the distance from the wall. When the distance was 22", I release the accelerator pedal, and the car stands still. Note: After the incident, I learned what "Creep" was. It's the slow forward (or reverse) motion when your foot is off the accelerator and brake, (just like when a gasoline engine car is in "Drive"). So when the car stopped, I tapped the accelerator to ease forward, as I would on a gasoline engine car. And the car shot forward like a rocket tearing a hole in the wall. Again, later, I found what "Chill" indicated. It was the slower mode of acceleration, and I had set it to the "Standard" or more appropriately, the Rocket mode. I have the following suggestions that Tesla , Inc. should incorporate to prevent this type of mishap:
1. The Tesla has a number of new features and handling characteristics that are radically different from a gasoline engine car. The delivery rep should spend more time in getting the customer familiar with the car's new technology, including taking the customer out for a demo drive and going through all the features like Summon, Auto-Park, Auto Pilot, Regenerative Braking, Creep, Chill, etc.
2. Someone on this forum had an excellent suggestion: Make the Creep and Chill modes default for a break-in period of 500 miles. Then the new owner can slowly start utilizing the newer functions as he gets more familiar with the driving and handling.
3. Provide a sensor that will disable acceleration if it sees an object directly ahead. So even if the driver "unintentionally" hits the accelerator pedal, it won't work.
Tesla just implemented in Version 9 what I suggested earlier in this thread. They call it "Obstacle-Aware Acceleration". You can read about it here.I have the following suggestions that Tesla , Inc. should incorporate to prevent this type of mishap:
[...]
3. Provide a sensor that will disable acceleration if it sees an object directly ahead. So even if the driver "unintentionally" hits the accelerator pedal, it won't work.
No one told me what "Creep" was, so I turned it off. Then I saw that Acceleration was on "Chill". Not knowing what that meant I switched it to "Standard" which seemed appropriate.
You read a manual to learn how to operate your new digital SLR camera, or learn the various settings in your new dishwasher. You can play around "intuitively" because you're not endangering yourself, any other person or property. I checked out the 2018.12 Model S manual later, and it describes "Chill" as "Limits acceleration for a smooth and gentle ride" and "Standard" as "Provides the normal level of acceleration". Yes, I wanted a normal level of acceleration, which is why I felt it was appropriate. No way on earth would I have known the difference unless I experienced it behind the wheel. All I'm saying is that a hands-on driving session with a Tesla delivery rep would be tremendously beneficial.
The real safety issue is the absence of a "disable acceleration" sensor. Apparently, Tesla has finally recognized this problem and as SucreTease pointed out above, they have rolled out Version 9 with a new feature called "Obstacle-Aware Acceleration", whereby full acceleration is reduced if an obstacle is detected directly ahead. Unfortunately, my Model S didn't have it. This feature could have saved a bunch of front end collisions. Talking to my service rep at the body shop, he told me there were 4 more Model S's in the shop, besides mine, with front end damage. All waiting on parts, which is another story.
There is still debate on this issue? How?
*scratches head*
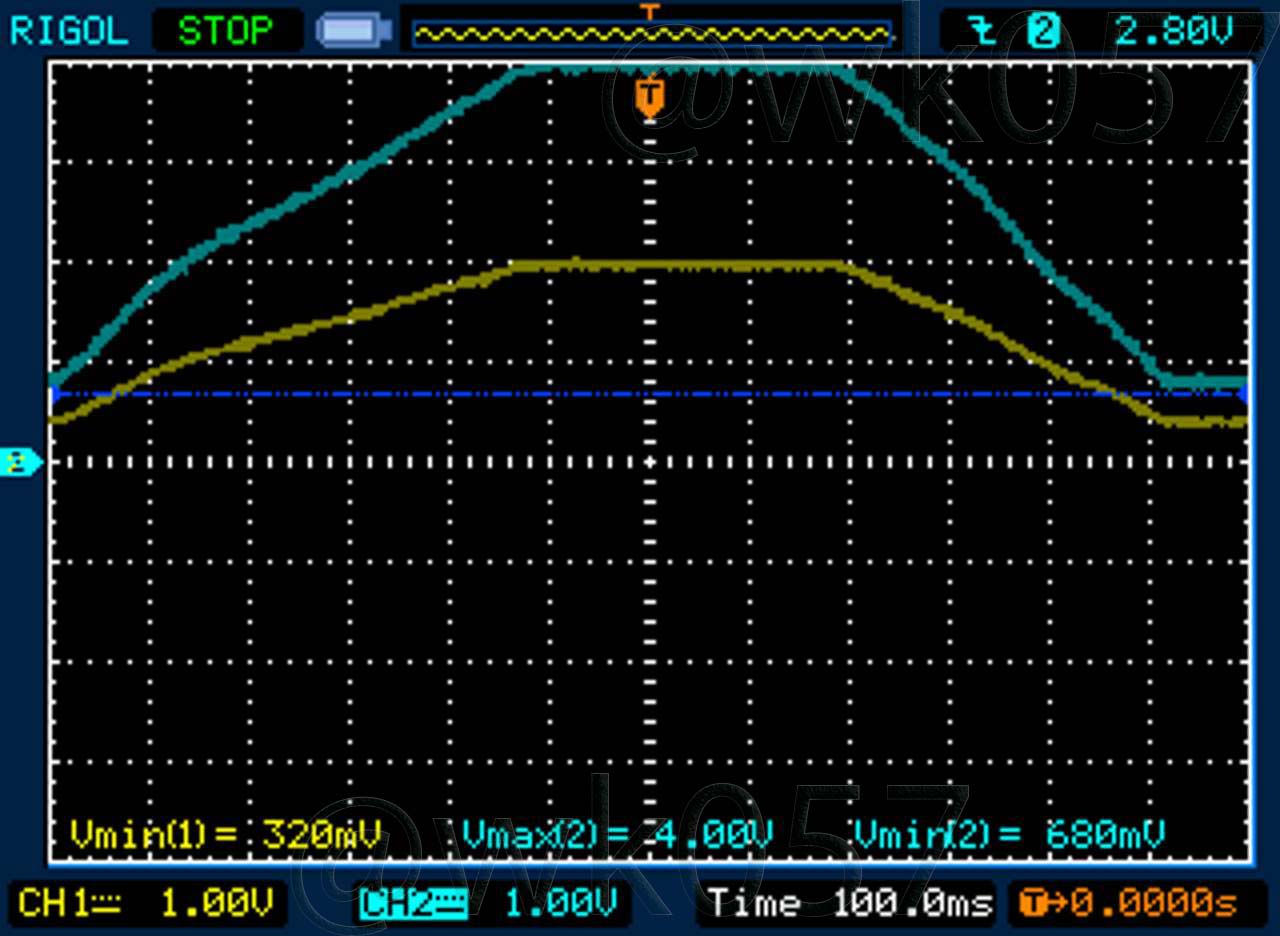
Let's look at the output of my scope with a Tesla accelerator pedal hooked to it while I press it to full and let off:
(Note, this is literally me physically pressing a pedal that is hooked to my scope. Timing of the changes is just me trying to fit a full ramp up and ramp down in the window...)
So, the first thing we'll notice here is that when the pedal is pressed to full, track 1 shows about 2V and track 2 shows about 4V. At not-pressed, 0.32V and 0.68V, respectively. (Don't take these as *exact* numbers. I literally just took 90 seconds hooking this to my scope and a 5V supply solely for this post. Probably a little error in there with my quick connections.)
Anyway, as you can see they have different offsets.
It's been argued that a short to 5V or short to ground or some kind of voltage spike would mean sudden acceleration. Well, looking at this graph, and knowing that all of the equipment involved checks both tracks for a consistent output along its respective curve for pedal position, I would personally love to know how that's possible. (Spoiler: It isn't.)
Let's try some failure modes and see if any can result in SUA:
- One track shorts to ground?
- Immediately obvious. Even at rest, it wouldn't output the resting voltage.
- Result: Car doesn't move.
- ... one track to 5V reference?
- Also obvious, as this is out of range for either track, even at full.
- Result: Car doesn't move.
- Both tracks to either gnd or 5V, or any combination of the same?
- Same as above. 5V and GND are out of range.
- Result: Car doesn't move.
- Random voltage spike on one track that stays in range?
- Using 4V max for T1 and 2V max for T2, let's say a spike of 0.5V happens on T1.
- If this puts it at over 4V, out of range.
- If this keeps it under 4V, lets say it takes a 3.5V real reading and makes it 4V.
- Car would see 4V on T1 and would NOT see 2V on T2. Bad read, input ignored.
- Result: Car doesn't move.
There is no way for some error, wiring issue, voltage spike, short, or anything of the like to cause the pedal to report the correct value on both T1 and T2 and result in non-commanded acceleration. For every pedal position there is only one correct combination of T1/T2 that is valid and accepted. That's why the system is designed in this way. The system can crosscheck both tracks' values and always know if the reading is valid. Tesla takes this even further, and the software demands a plausible ramp to a higher value for an increase in pedal position to be valid. So, for example, you can't just inject 4V/2V on the tracks to get full acceleration. It would be rejected without a plausible ramp up to those values, even if such a ramp is only a handful of milliseconds (as it would actually take with a physical pedal). The behavior in the event that something doesn't check out is to cut power. No acceleration. (Edit: To note, it does NOT demand this for a *decrease* in pedal position. A drop to the 0% T1/T2 always appears to be accepted even if the immediately preceding sample is 100% application).
Let's put it this way. One of my projects has been to be able to make my Model S into a big RC car. To do so a ton of different safety mechanisms have to be overridden one way or another. Faking out the accelerator pedal has proven to be quite challenging, since the system has many ways to determine if even valid-looking values are produced by a physical pedal being applied and works to reject "fake" pedal values generated by a DAC even when they would seem plausible.
Overall really, just put this to rest. No one's Tesla has ever just decided to accelerate massively on its own. It is simply impossible.
Yes, I wanted a normal level of acceleration, which is why I felt it was appropriate. No way on earth would I have known the difference unless I experienced it behind the wheel.
Sorry to hear about your accident, but I think this falls into the realm of "you can't prepare owners for every eventuality." The only problem that Tesla is trying to curb with "Obstacle-Awareness" is that BEVs have an acceleration profile that has harsher punishment for mistakes. That's just the nature of the tech.
You admit to having driven the vehicle for a few weeks before this incident, and one would assume you would have acclimated to the accelerator position to speed profile in that time. Are you saying that you wouldn't have used a proportionally similar amount of accelerator input if it was in "Chill" mode?
Again, I'm sorry to hear about your accident, and certainly more information at the time of delivery will always be beneficial.
I suspect (but don't know) that if you have an open or short on one channel, that's when you can get a reduced power scenario. Were I writing the software, that's exactly the scenario in which I would allow for reduced power. Flag the fault, then validate the other channel very tightly and allow limited acceleration. That avoids the 'broken wire, stuck on railroad tracks' scenario while not resulting in an uncontrollable car if you get garbage on the remaining channel.Have you verified all these “Doesn’t Move” scenarios, or are you just speculating? My MS75D had a bad wiring harness that kept causing accelerator faults. I had many “reduced power” instances, but I was always able to move, but with severely reduced power. It took 10 trips to the SC before they figured it out.
Have you verified all these “Doesn’t Move” scenarios, or are you just speculating? My MS75D had a bad wiring harness that kept causing accelerator faults. I had many “reduced power” instances, but I was always able to move, but with severely reduced power. It took 10 trips to the SC before they figured it out.
Hi folks, I'm a new Tesla Model S owner and hence new to this forum. I picked up my brand new Model S a few weeks ago and the next day rammed it into my garage wall. IMHO all this talk about sudden unintended acceleration is all baseless. Here's what I believe happened in my case: I drove the car home (35 miles) after taking delivery and safely parked it in my 2-car garage. The next morning, I pulled it out onto the driveway and started going through the Control settings. The lady at the delivery center had spent about 10 minutes in "orientation", saying that "it's very intuitive and you'll be up and running in no time". So I went through the controls and made some changes. No one told me what "Creep" was, so I turned it off. Then I saw that Acceleration was on "Chill". Not knowing what that meant I switched it to "Standard" which seemed appropriate. So now I'm easing the car back into the garage, and the sensors are showing (in orange) the distance from the wall. When the distance was 22", I release the accelerator pedal, and the car stands still. Note: After the incident, I learned what "Creep" was. It's the slow forward (or reverse) motion when your foot is off the accelerator and brake, (just like when a gasoline engine car is in "Drive"). So when the car stopped, I tapped the accelerator to ease forward, as I would on a gasoline engine car. And the car shot forward like a rocket tearing a hole in the wall. Again, later, I found what "Chill" indicated. It was the slower mode of acceleration, and I had set it to the "Standard" or more appropriately, the Rocket mode. I have the following suggestions that Tesla , Inc. should incorporate to prevent this type of mishap:
1. The Tesla has a number of new features and handling characteristics that are radically different from a gasoline engine car. The delivery rep should spend more time in getting the customer familiar with the car's new technology, including taking the customer out for a demo drive and going through all the features like Summon, Auto-Park, Auto Pilot, Regenerative Braking, Creep, Chill, etc.
2. Someone on this forum had an excellent suggestion: Make the Creep and Chill modes default for a break-in period of 500 miles. Then the new owner can slowly start utilizing the newer functions as he gets more familiar with the driving and handling.
3. Provide a sensor that will disable acceleration if it sees an object directly ahead. So even if the driver "unintentionally" hits the accelerator pedal, it won't work.
You changed a setting for vehicle acceleration and decided to test it at a distance of less than two feet from a wall.
There is still debate on this issue? How?
