DeepMind has a method for behavior cloning(see how humans do a task) + learning a model for how well a human would be rating it's results. In the simulation it learns the task "clean the room". Should not be too hard to adapt for a high level control system for Optimus. By repeating the process of improving the reward function they manage to surpass the human instructor on 162 different tasks.



Welcome to Tesla Motors Club
Discuss Tesla's Model S, Model 3, Model X, Model Y, Cybertruck, Roadster and More.
Register
Install the app
How to install the app on iOS
You can install our site as a web app on your iOS device by utilizing the Add to Home Screen feature in Safari. Please see this thread for more details on this.
Note: This feature may not be available in some browsers.
-
Want to remove ads? Register an account and login to see fewer ads, and become a Supporting Member to remove almost all ads.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Tesla Optimus Sub-Prime Robot
- Thread starter MC3OZ
- Start date

That’s pretty cool. Between results like this and what LLMs like ChatGPT can do, it seems that Tesla is building Optimus at exactly the right time. I was worried when Elon announced Optimus a year ago that it was too early since the AI wasn’t ready. As usual, Elon appears to have been right.DeepMind has a method for behavior cloning(see how humans do a task) + learning a model for how well a human would be rating it's results. In the simulation it learns the task "clean the room". Should not be too hard to adapt for a high level control system for Optimus. By repeating the process of improving the reward function they manage to surpass the human instructor on 162 different tasks.
And the results seems to validate Elon's thinking. Just get the product out, have users rate how well it performs and it will quickly iterate its performance on various tasks to superhuman levels. Not too unlike how ChatGPT extends GPT3 by having users rating answers and by now far exceeds my ability to write rap songs about deep learning. Only thing is you will need is lots of compute and data, if only Tesla had a good infrastructure for that... Oh wait Dojo, and their data fleet covers this exceedingly well. And yeah a good simulation environment doesn't hurt, Tesla got that.That’s pretty cool. Between results like this and what LLMs like ChatGPT can do, it seems that Tesla is building Optimus at exactly the right time. I was worried when Elon announced Optimus a year ago that it was too early since the AI wasn’t ready. As usual, Elon appears to have been right.
Paper a few posts ago solved how to understand user requests, do dialogue and generate subtasks to solve a bigger task. This paper:
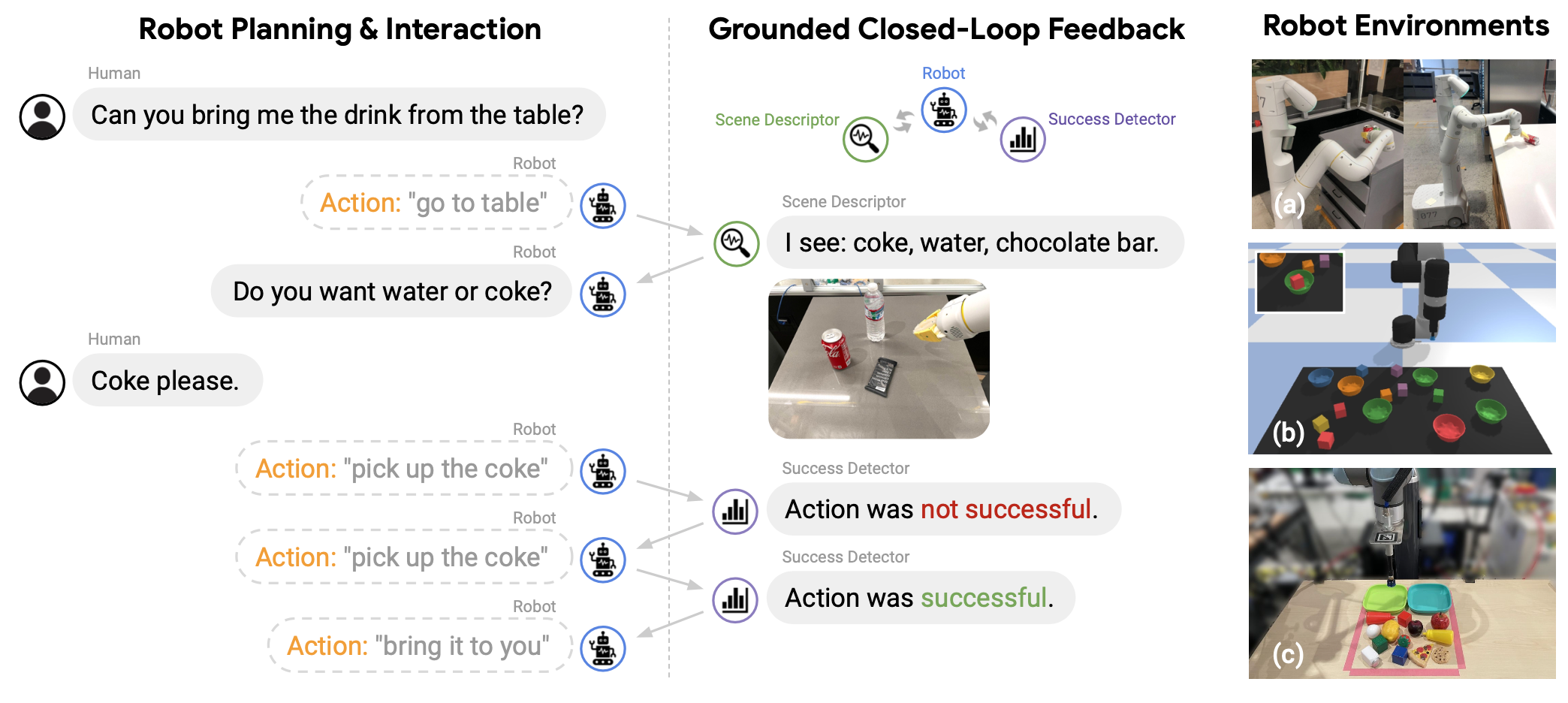
Inner Monologue: Embodied Reasoning through Planning with Language Models.
Project page for Inner Monologue: Embodied Reasoning through Planning with Language Models
innermonologue.github.io
The new paper(btw the website is good) extends for how to perform a subtask by imitating humans and getting rated on its performance. So what's actually missing? Seems to me they just need lots of examples, nail the low level controller(for standing up, walking, manipulating objects) and then they could actually start making beby steps on the really hard tasks such as "put the dishes in the dish washer", "clean the room", "fold the laundry", "walk the dog".
I don't see what's missing... What's left to solve? Building it at scale, which is what they are the only team doing.
EDIT: I realize it also validates Elon's approach of making a humanoid robot with all the relevant human human limbs, so it can learn from observing how human use their limbs to manipulate the world. Again, Elon happens to be lucky with his intuition...
Last edited:
Again, Elon happens to be lucky with his intuition...
A sarcastic compliment? It wasn’t luck of course. Elon does a very good job at synthesizing all available data and extrapolating where everything is going. He is occasionally wrong, but right way more often and on hard things to be right on.
Tesla will have a 7+ year lead on humanoid robots before anyone else big tries to copy them, and by then it’ll be too late. Hmmm, where have I seen that before?
Interesting video, thanks. Yeah I agree. Tesla also has a long way to go too!Nice behind the scenes of Atlas:
Looks very clunky and so much software 1.0 and heuristics. Not focusing on scale. They are the Formula 1, Optimus is the Tesla.
I'm in the process of looking for a house for me and the girlfriend. Been thinking how optimus will change living in the future. Let's assume that in 5-10 years Tesla will be making millions of bots that can replace humans for a wide range of tasks. So how does this change the housing market?
First if bots can build houses, then suddenly we can make a lot more houses that should cost less and be built using more "manual" labor ie details. Pain the walls with custom patterns no problem. Giga Berlin style walls paintings by stablediffusionX will cost a few bucks.
Second if bots can help maintain a property, having a very large property will suddenly be less of problem. Cleaning a large house no problem. Gardening, picking up leaves, landscaping etc no problem. Taking care of animal excrements no problem so having lots of animals(think alpacas and minigoats) for fun will be easy. Ie I think the value of living in a large plot a bit further from the city will increase. Robotaxi will also make living a bit away from the city less of a pain with commute, deliveries etc. eVTOL should make transportation less of a problem.
So in all, I think living in a nice climate, at a big lot will become very popular. A mcmansion in suburb will probably lose a lot of value as there will be tons of these for cheap.
Your ideas?
First if bots can build houses, then suddenly we can make a lot more houses that should cost less and be built using more "manual" labor ie details. Pain the walls with custom patterns no problem. Giga Berlin style walls paintings by stablediffusionX will cost a few bucks.
Second if bots can help maintain a property, having a very large property will suddenly be less of problem. Cleaning a large house no problem. Gardening, picking up leaves, landscaping etc no problem. Taking care of animal excrements no problem so having lots of animals(think alpacas and minigoats) for fun will be easy. Ie I think the value of living in a large plot a bit further from the city will increase. Robotaxi will also make living a bit away from the city less of a pain with commute, deliveries etc. eVTOL should make transportation less of a problem.
So in all, I think living in a nice climate, at a big lot will become very popular. A mcmansion in suburb will probably lose a lot of value as there will be tons of these for cheap.
Your ideas?
Dikkie Dik
If gets hard, use hammer
It’s Alive 
Optimus just got his own account on the Bird
Optimus just got his own account on the Bird
EldestOyster
Member
This is starting to play out like a Star Trek episode, considering that Bots aren't allowed to post.It’s Alive
Optimus just got his own account on the Bird
Buckminster
Well-Known Member
Buckminster
Well-Known Member
Buckminster
Well-Known Member
Buckminster
Well-Known Member
Buckminster
Well-Known Member
The picture has optimi for Model 3 also. I think it's more a concept for the idea of working on smaller parts rather than sending around the large part.
Regarding Optimus at investor day:
I was impressed. Grabbing the arm like it did and pulling the cloth is not easy. It was a quick demo, but already looks capable. It still walks a bit shaky, maybe this will be the case when you use motors instead of hydralics/muscles and will never really go away. We will see...
The hands didn't look strong enough to actually use the drill effectively. Maybe they need to iterate the hands a bit.
Their backs looked a bit like Bumble C, need to clean up that...
Anyway, a lot of progress in such a short time! Im impressed!
Buckminster
Well-Known Member
Buckminster
Well-Known Member
I know the robot demo was staged, but there's a part in the video where the bot seemingly missed and then repositioned and retried:
View attachment 912828
Buckminster
Well-Known Member
ShareLofty
Member
A robot riding a bicycle seems incredibly impresssive. Is there something I missed in that video?
It's a pretty simple system, not super hard to get the Euler Lagrange for the system and the control can be done by a simple controller:A robot riding a bicycle seems incredibly impresssive. Is there something I missed in that video?

Balancing control of a robot bicycle with uncertain center of gravity | Semantic Scholar
In this research, a small humanoid robot and a bicycle of comparable size are constructed and the proposed controller can automatically counteract the mass imbalance in the system and allow the robot to perform straight-line steering. In this research, a small humanoid robot and a bicycle of...
 www.semanticscholar.org
www.semanticscholar.org
Doubt the robot have much many more sensors than a gyro and the motors.
Basically you start from 3 points and the mass between the points -> stable system and as soon as you get some motion you get the gyro effect helping to maintain the balance. Then once you are balanced you can steer the system slightly to the side by just leaning some mass to that side.
Tesla bot needs vision->state estimation which is tricky. Then it needs to move its arms and manipulate objects adding lots of disturbances to the balance problem.
The robot on a bicyle is a fun student project. Think me and my friends could have solved it when we were students. Fwiw we built this robot back in the days:
Last edited:
Similar threads
- Replies
- 3
- Views
- 535
- Replies
- 1
- Views
- 815
- Replies
- 26
- Views
- 4K
- Replies
- 1K
- Views
- 62K
- Locked
- Marketplace listing
- Replies
- 1
- Views
- 451