That is true and I am sceptical about his procedure myself. I'm just curious if there are any hints in the code/NNs/whatever that support this claim. Because...
Just for reference,
someone else on TMC did a similar test some while ago, with a completely different result.
If we assume that both tests succeeded in blocking out the respective cameras we get to this conclusion:
AP2 before 2018.10.4:
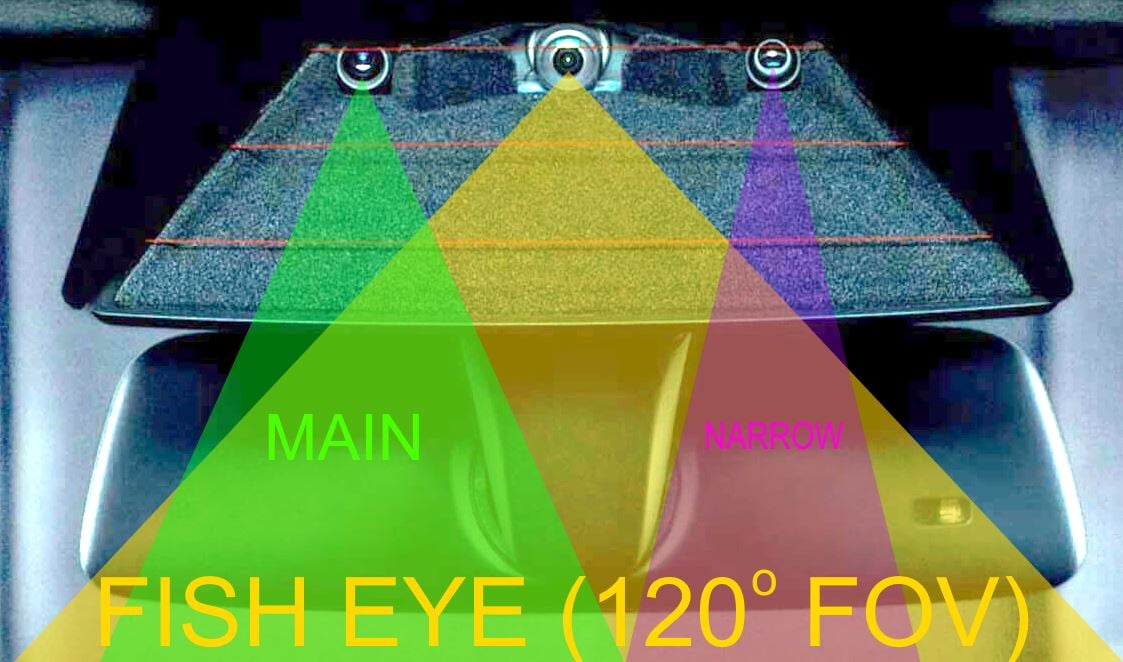
Normal performance with fisheye and main camera.
Impaired performance with only fisheye.
AP2 after 2018.10.4:
Normal performance with only fisheye camera.
The results of the old test support the hypothesis that Tesla used two of the forward cameras in a stereo setup, since the performance drops heavily when one of the active cameras is covered.
The results of the current test support the hypothesis that Tesla either completely moved away from the stereo setup, or if not, that their stereo setup is either improbably robust or offers no benefit at all.
It would be very interesting if someone could try to repeat this test and confirm those findings.