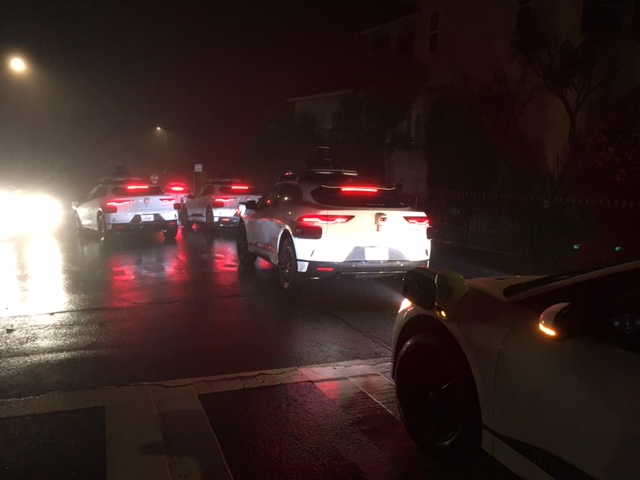
Apparently fog defeated the Waymos, but it didn't seem to be a problem for humans...
To be fair, we probably shouldn't use the fact that humans continue to drive in deteriorating-visibility conditions, as a benchmark for early-generation Robotaxis
")
.
My suggestion to Waymo would be that they put a status message on the interior screen, similar to Tesla Dog Mode, so that people can peer in and see if the car knows why it's just sitting there. If the screen said
"Waymo paused for safety - Fog condition detected"
It might elicit a few snarky comments but overall people would appreciate it, compared to just a mystery stoppage.
This actually goes to my view of the often debated L4 ODD (latest installment found on the previous page of this thread). It's not just a map geofence. A practical L4 vehicle, whether Robotaxi or personally owned, will evaluate the requested route and will accept, refuse or something in between, based on a number of factors including weather, road classifications, reported traffic issues, construction, police information etc.
The "something in between" would usually be a notice to the requestor that there is an X percent likelihood of delay or even failure to complete the requested route. For a personal vehicle, the owner may have a higher risk tolerance for delays or return home scenarios; the Robotaxi operator may apply a more conservative standard.
This is fundamentally not really different from human-driven cars and taxis. But back to the SF fog example, humans will tend to continue operating the vehicle even when the risk is unusually high - because usually they get away with it, and if they don't it's not national news.









/cdn.vox-cdn.com/uploads/chorus_asset/file/24630263/1470596502.jpg)