Dear camera savvy, driver assistance-knowledgeable and AP2HW insightful fellows. My head is full of questions about Teslas 8 x camera sensor suite. Such questions are being touched upon now and then in many different threads, but I would really like to read some more focused discussion on the topic. So:
Forward cameras:
Narrow: 250 m (820 ft)
Main: 150 m (490 ft)
Wide: 60 m (195 ft)
Forward / side looking B-pillar cameras:
80 m (260 ft)
Rearward / side looking side repeater cameras:
100 m (330 ft)
Backup (rear view) camera:
50 m (165 ft)
And here's a quick sketchup of the camera vision, based on the official renderings:
Please, please don't destroy this thread with long discussions about radars, lidars, GPS, ultrasonic or other sensor types. OTOH, all camera talk must pass")
- What capabilities and limitations can/should we expect from Teslas 8 x camera sensors, given available information about their physical position, their FOVs, range, colors, resolution etc.?
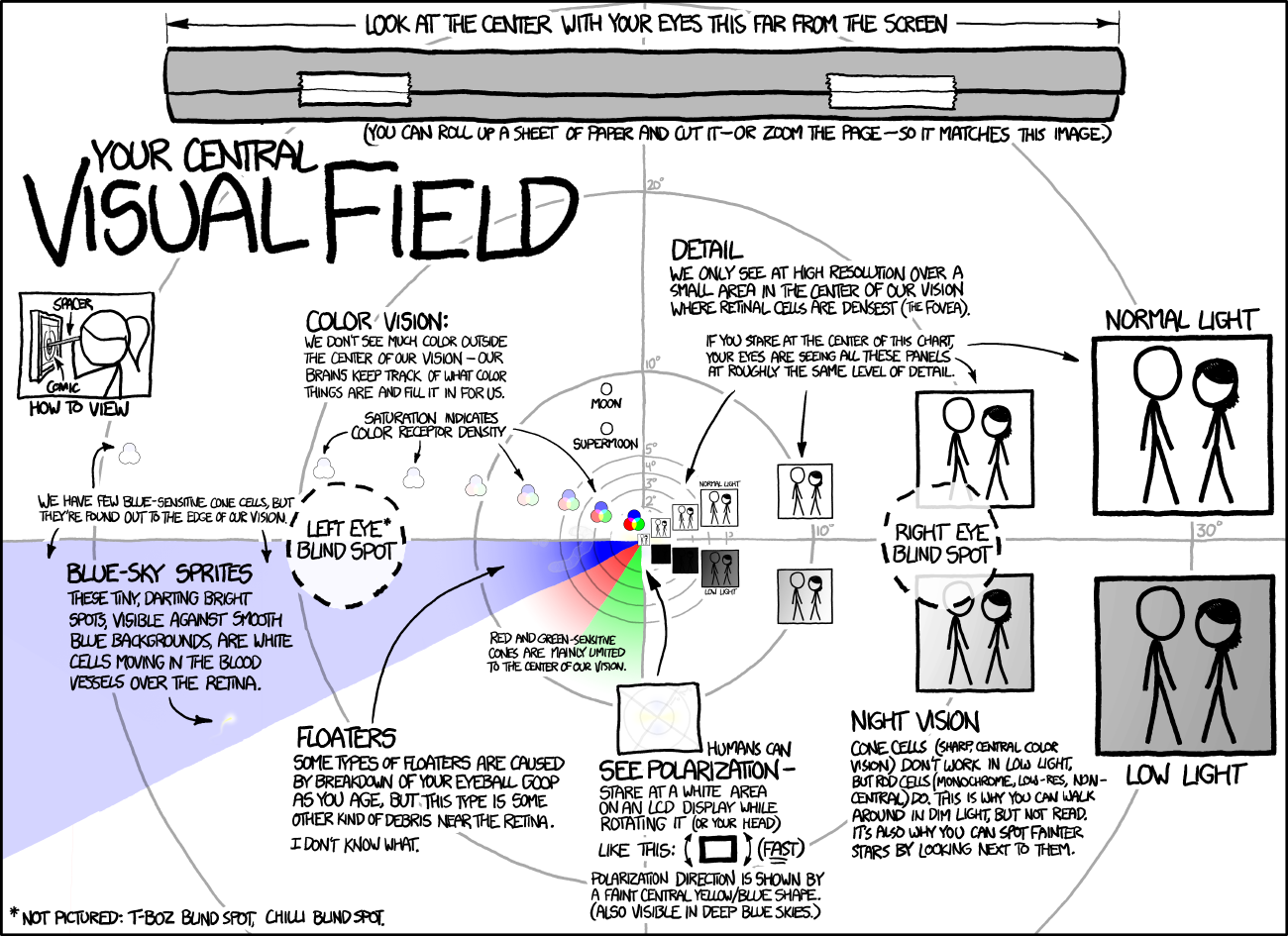
- How do the cameras compare to our human eyesight?
- How much of a difference does ambient light, artificial light (headlamps etc.) play for the camera vision?
- Are there certain scenarios where we can absolutely and definitely say that the cameras are of no help to the AP2-system?
- Also, what do you think about the physical positioning of the cameras on the vehicle? I'm also wondering about the so called "heating elements", the absence of water and dust wiping/blasting mechanisms, etc.
Forward cameras:
Narrow: 250 m (820 ft)
Main: 150 m (490 ft)
Wide: 60 m (195 ft)
Forward / side looking B-pillar cameras:
80 m (260 ft)
Rearward / side looking side repeater cameras:
100 m (330 ft)
Backup (rear view) camera:
50 m (165 ft)
And here's a quick sketchup of the camera vision, based on the official renderings:
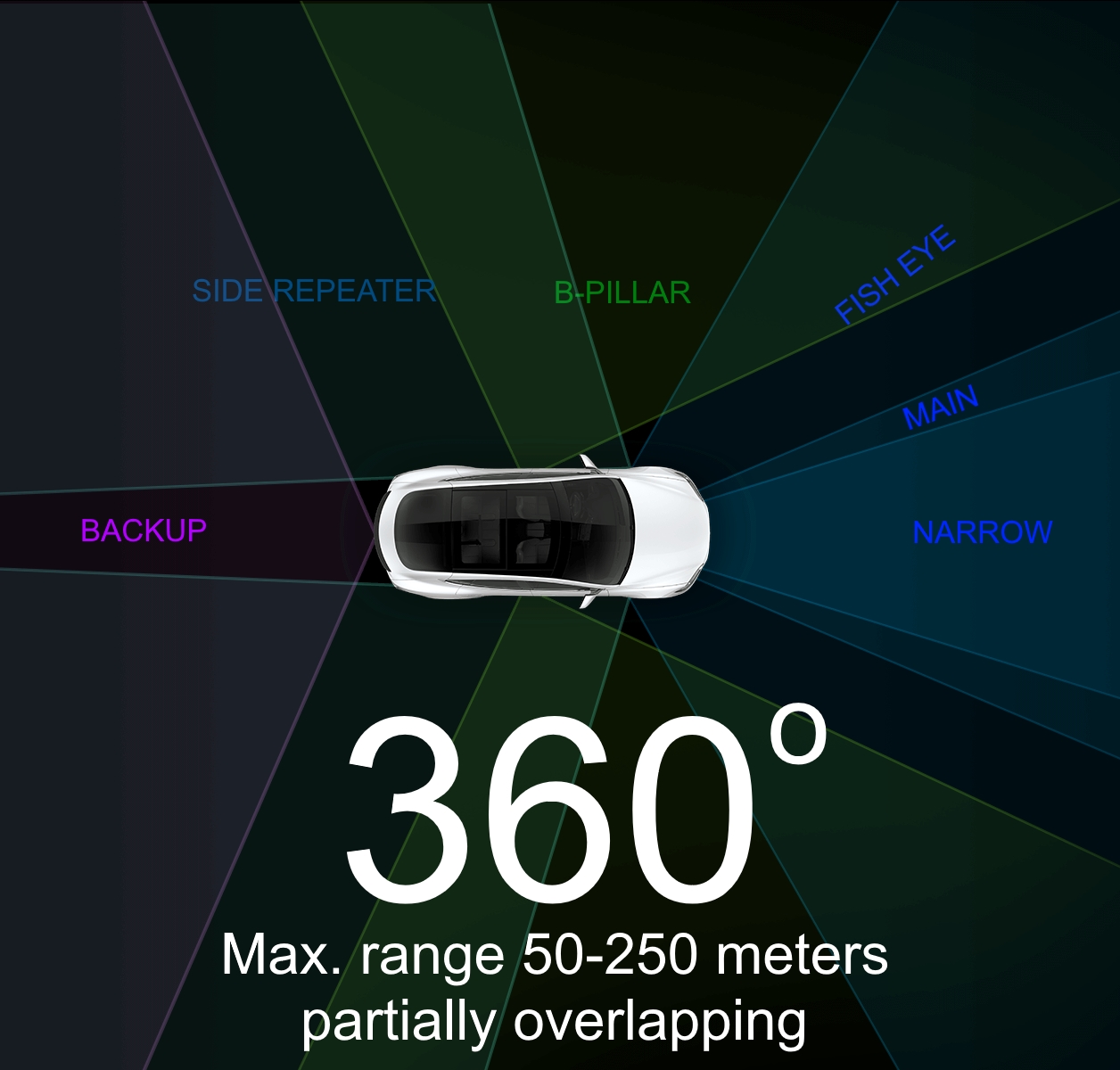
Please, please don't destroy this thread with long discussions about radars, lidars, GPS, ultrasonic or other sensor types. OTOH, all camera talk must pass