have you SEEN a taxi driver drive in NYC recently???That’s why I’m always saying 10x human safety is impossible. If I’m riding in a robotaxi I want a lower chance of getting injured or dying. Fault is 100% irrelevant to me.
If you make the at-fault metric the main one then a robotaxi could actually make the roads less safe. I’m not saying robotaxi companies should be liable for not at fault collisions just that it is not acceptable for them to have more collisions than human drivers.



Welcome to Tesla Motors Club
Discuss Tesla's Model S, Model 3, Model X, Model Y, Cybertruck, Roadster and More.
Register
Install the app
How to install the app on iOS
You can install our site as a web app on your iOS device by utilizing the Add to Home Screen feature in Safari. Please see this thread for more details on this.
Note: This feature may not be available in some browsers.
-
Want to remove ads? Register an account and login to see fewer ads, and become a Supporting Member to remove almost all ads.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
FSD Beta 10.13
- Thread starter Todd Burch
- Start date
Daniel in SD
(supervised)
Quick google search says 4.6 reported collisions per million miles vs. 6.7 for all vehicles. I’d be happy in a robotaxi that did 4.have you SEEN a taxi driver drive in NYC recently???
Wondering about the somewhat sudden change in Tesla's FSD update policy. In the past updates have been fairly frequent with improvements in many areas in the 5%-20% range ( as stated in the release notes). This release appears to be held up (at least partially) waiting for a 90% (ish) success in Chuck's ULT. Have to wonder if the departure of AK has changed the upgrade philosophy for FSD. Also wondering why the update policy appears to different for the non-FSD versions.
TravelFree
Active Member
You are correct that 90% is not good enough. True FSD does need to be many times better than human drivers. It should be very close to 100% but it does not need to be 100% perfect. Nothing is 100% perfect.
I wasn't quoting statistics. The trouble with putting whole numbers as a figure of speech is some will come along and want to disagree because their number is for example 91.702 vs 90%. When Musk says it is now 9 out of 10 times correct nobody questions that. My point is 1 time failure in 10 turns is not good enough, but is a step in the right direction from 6 failures out of 7 demonstrated by Chuck Cook.I also question your stat that 1 accident in 100M miles would cause regulators to shut FSD down. Not sure where you are getting that stat from. A quick Google search finds that humans get into an accident about 1 per 533,333.33 miles. So 1 accident in 100M miles would be a whopping 200x safer than humans. If FSD only got into an accident every 100M miles, we would immediately deploy them everywhere now because that would be amazing safety.
100% is a rounding of 97.7 or 99.8% perfect. Of course I understand nothing is ever 100% perfect 100% of the time.
The point in what I posted was that Tesla is a target for an unusual amount of public scrutiny by regulators and the media. So, in effect their measure for excellence is greater than for the competitors. I have a pretty good idea why which I'm sure many will disagree as well.
- It's because Tesla is the king of the pack. All focus is on the king.
- It's because Tesla does not advertise in the media and the media aren't being paid to have any bias toward Tesla as they do toward the competitors.
- It's because Elon Musk is arrogant and makes fools out of those who try to paint a negative picture of Tesla.
- They are not the number one in computers or phones, They are comfortable as #2
- Apple pays media in advertising. Media doesn't bite the hand that feeds them.
- Tim Cook is humble and doesn't make fools out of those who criticize him.
I really don't care what Waymo does. They are more like a bus route- aka geo fenced system, while Tesla is wanting to be a true Level 5 autonomy to go anywhere the passenger wants. I am in the camp that Tesla will not have true Level 5 autonomy for several years, maybe a decade away until certain changes are achieved in the hardware as well as software as well as the AI advances. However, I do have a high level of confidence it will happen and Tesla will solve it even if not in my lifetime.
TravelFree
Active Member
First of all I don't think Tesla is waiting for a 9 out of 10 ULT success to release the next update, rather they are looking to solve the high failure rate of ULT. It's a basic maneuver that I see as hampered by occluded vision and lack of cameras at the very front of the vehicles. So Tesla is trying to solve it with creep and other means.Wondering about the somewhat sudden change in Tesla's FSD update policy. In the past updates have been fairly frequent with improvements in many areas in the 5%-20% range ( as stated in the release notes). This release appears to be held up (at least partially) waiting for a 90% (ish) success in Chuck's ULT. Have to wonder if the departure of AK has changed the upgrade philosophy for FSD. Also wondering why the update policy appears to different for the non-FSD versions.
I believe in the beginning many of the improvements were easy to achieve because they were simple and a great many improvements happened fast. As the FSD code gets better approaching perfection becomes much more difficult.
For my experience, rural roads is near perfect and I use FSD beta most of the time. It is still scary erratic in downtown traffic with construction, school busses and drivers driving illegally, so it's not ready for me at all, unless I just want to piss off other impatient drivers.
AlanSubie4Life
Efficiency Obsessed Member
This is most definitely not why Chuck’s turn is failing, FWIW. It’s just not driving the turn correctly. Visibility is perfect on this turn.It's a basic maneuver that I see as hampered by occluded vision and lack of cameras at the very front of the vehicles.
AK departure is unlikely to have any impact on the release cadence. That is decided by the build process (almost certainly agile) which is a complex pipeline that is gated by a large number of factors across multiple development teams.Wondering about the somewhat sudden change in Tesla's FSD update policy. In the past updates have been fairly frequent with improvements in many areas in the 5%-20% range ( as stated in the release notes). This release appears to be held up (at least partially) waiting for a 90% (ish) success in Chuck's ULT. Have to wonder if the departure of AK has changed the upgrade philosophy for FSD. Also wondering why the update policy appears to different for the non-FSD versions.
Also wondering why the update policy appears to different for the non-FSD versions.
because the non-FSD code (traditional AP/NoA) is not really being improved. The goal is to have the FSDb code take over highways. That's what's being called "single stack" around here and as of now expected to be released in a v11 release of FSDb.
myshenaini
Member
Or v11.69because the non-FSD code (traditional AP/NoA) is not really being improved. The goal is to have the FSDb code take over highways. That's what's being called "single stack" around here and as of now expected to be released in a v11 release of FSDb.
")
jabloomf1230
Minister of Silly Walks
Occluded visibility is one factor with Chuck's ULT. If the ULT was on to a 35 mph 2 lane highway, the car could safely peek out to get a better view. It would also have more time to react, because of the lower speed. Rolling out to clear the vegetation is too dangerous with Chuck's ULT.This is most definitely not why Chuck’s turn is failing, FWIW. It’s just not driving the turn correctly. Visibility is perfect on this turn.
However, I agree that the car does not drive the ULT correctly with 10.12.2. The car should enter the median on an angle and then proceed when safe. I suspect that's all that 10.13 will do, based on Chuck's "spy" videos.
45thParallel
Member
FSD next update coming on 20th August as per Musk.
 driveteslacanada.ca
driveteslacanada.ca
Musk says FSD Beta 10.69 [v.10.13] coming on the 20th
Tesla CEO Elon Musk has tweeted the release date for FSD Beta 10.69 or v.10.13. The boss immediately followed up with a tweet saying the release would be huge. Here is a video of Tesla’s FSD […]
driveteslacanada.ca
Daniel in SD
(supervised)
The car can see very far down the road. Chuck has a camera mounted at the B pillar position. If you watch the part of the video where he's standing in the cross walk you can count 20 seconds from when cars become visible to when they passes him.Occluded visibility is one factor with Chuck's ULT. If the ULT was on to a 35 mph 2 lane highway, the car could safely peek out to get a better view. It would also have more time to react, because of the lower speed. Rolling out to clear the vegetation is too dangerous with Chuck's ULT.
However, I agree that the car does not drive the ULT correctly with 10.12.2. The car should enter the median on an angle and then proceed when safe. I suspect that's all that 10.13 will do, based on Chuck's "spy" videos.
diplomat33
Average guy who loves autonomous vehicles
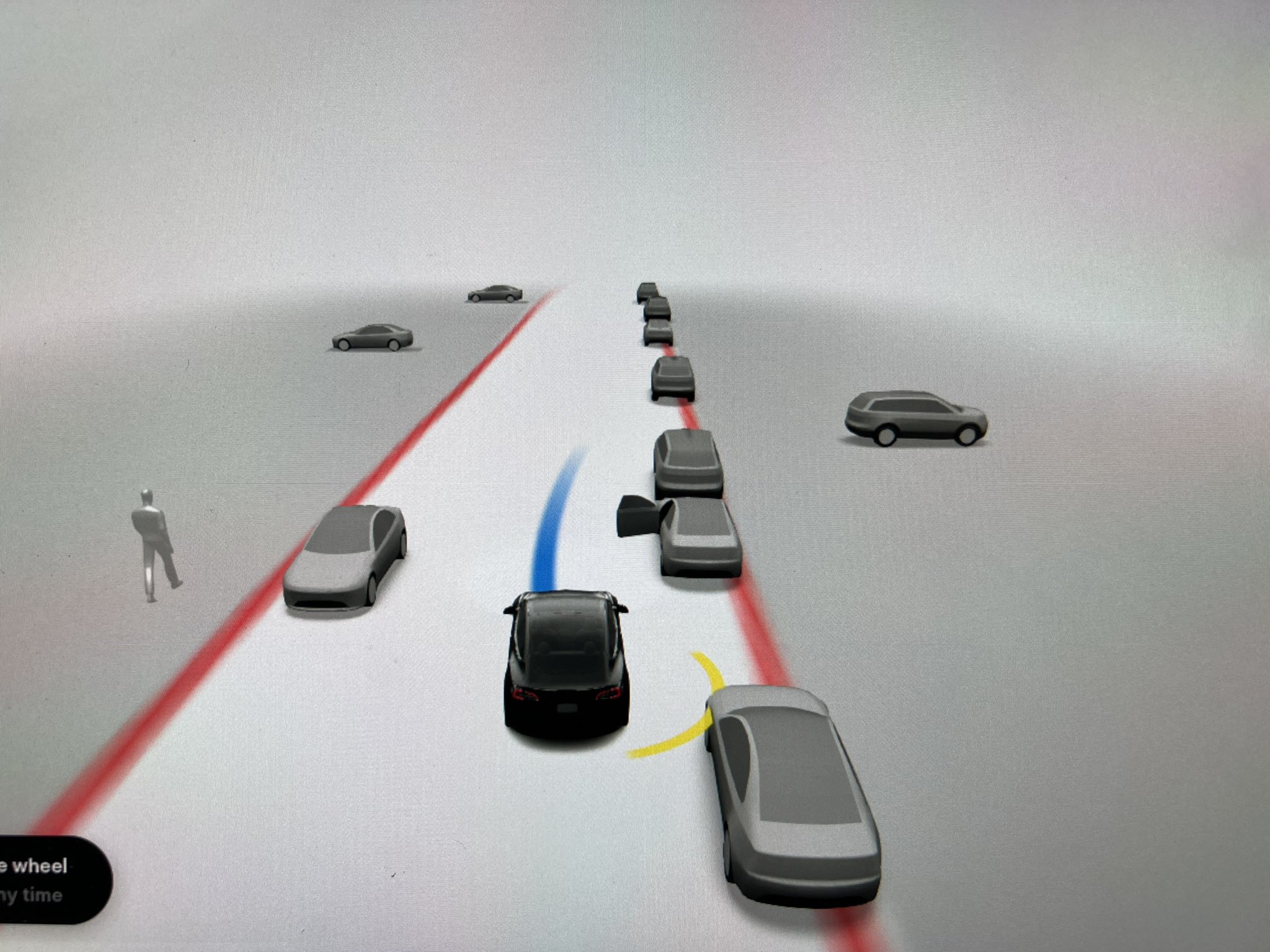
The car can see very far down the road. Chuck has a camera mounted at the B pillar position. If you watch the part of the video where he's standing in the cross walk you can count 20 seconds from when cars become visible to when they passes him.
View attachment 838091
Except, according to the AP2 graphic, the B pillar camera only has a range of about 80 meters. So the car cannot see that far. It can only see up to tree 4. So unless the camera range has changed, the Tesla cannot accurately detect those two vehicles that are further than tree 4.
jabloomf1230
Minister of Silly Walks
You may be counting 20 seconds, but Chuck says 3 seconds in that video. Also, the camera view is from a wide angle cam mounted on the car roof, aligned even with the B pillar. It is not from the car's camera feed. Lastly, Chuck points out that it would be dangerous to creep out such that the nose of the car is almost even with the white line that demarcates the highway's shoulder.The car can see very far down the road. Chuck has a camera mounted at the B pillar position. If you watch the part of the video where he's standing in the cross walk you can count 20 seconds from when cars become visible to when they passes him.
View attachment 838091
Daniel in SD
(supervised)
I wasn't talking about the capability of the cameras I was talking about what I can clearly see in YouTube compressed video. I have no idea what the NN's or camera are capable of discerning. I suspect that if I were looking at the raw B pillar camera feed my neural net could see cars 20 seconds away. Therefore the issue is not the camera placement or the intersection design. The position of the car with the B pillar camera in the center of the crosswalk looks plenty safe to me. The key is not creep while cars are in view! that's what freaks other drivers out.You may be counting 20 seconds, but Chuck says 3 seconds in that video. Also, the camera view is from a wide angle cam mounted on the car roof, aligned even with the B pillar. It is not from the car's camera feed. Lastly, Chuck points out that it would be dangerous to creep out such that the nose of the car is almost even with the white line that demarcates the highway's shoulder.
Mobile3228
Member
Don't forget that a human can turn their head, and bend forwardWhich would be useless with this turn.
The current sensor suite is sufficient for this turn. A human could make the go/no-go decision easily with the existing sensors. The sensors could definitely be better and it would likely help (eventually, in general) though. But I doubt that is currently the limiting factor for this turn, since the cameras would work for a human.
Last edited:
AlanSubie4Life
Efficiency Obsessed Member
Just watch Chuck’s video.Occluded visibility is one factor with Chuck's ULT. If the ULT was on to a 35 mph 2 lane highway, the car could safely peek out to get a better view. It would also have more time to react, because of the lower speed. Rolling out to clear the vegetation is too dangerous with Chuck's ULT.
Visibility is not an issue at all with this turn. It is very clear.
Obviously if the car pulls up 10 feet short of where it should, it won’t be able to see. But it easily has good visibility even if the front bumper is 4-5 feet short of the edge of the traffic lanes. You can measure it out and see.
My only point here was that restricted visibility and camera position has nothing to do with why the car cannot make this specific turn. Obviously there are turns where having a camera mounted further forward would be helpful (those would also be harder turns for a human (Chuck’s is a pretty easy turn), though a human sits further forward and would be 1-2 feet better off). But not for this turn!
You could have a camera in the front bumper looking straight down the street and if everything else was the same, we’d see all the same failures. Guaranteed.
I think it is important to identify the problem correctly. I’m sure Tesla has - they are certainly aware it is not camera position.
And they also know that they have to get the stopping “pose” correct.
jabloomf1230
Minister of Silly Walks
I wasn't talking about the capability of the cameras I was talking about what I can clearly see in YouTube compressed video. I have no idea what the NN's or camera are capable of discerning. I suspect that if I were looking at the raw B pillar camera feed my neural net could see cars 20 seconds away. Therefore the issue is not the camera placement or the intersection design. The position of the car with the B pillar camera in the center of the crosswalk looks plenty safe to me. The key is not creep while cars are in view! that's what freaks other drivers out.
I won't vouch for the calculations in this video, but the concepts are correct. The B pillar cam has a 90° FOV which is what limits the car's ability to safely do Chuck's ULT.
Don't forget that a human can turn their head, and bend forward
I have been paying a lot of attention to when I lean forward. Here's what I've found:
1) when looking leftward, leaning forward is useful if the A pillar is likely obstructing a good chunk of visibility
2) when looking rightward, leaning forward is useful if the passenger is flat-out blocking your view.
3) when the intersection has limited visibility due to shrubs, buildings, or how the road bends, etc., leaning forward does ABSOLUTELY NOTHING. We do it anyway in an attempt to gain visibility, so we might think it's helpful or more advantageous than a fixed camera. But it really isn't.
As for scenarios 1 and 2? Doesn't affect exterior cameras at all.
When it's an intersection with poor visibility, we inevitably have to creep into the lane, and that's the reason we find those intersections dangerous: we can't see until we're in an unsafe position. This is why you may see "blind driveway" or "vehicles exiting" signs on the main road. The car with the right of way needs to be cautious.
(speaking in general here, not specifically wrt Chuck's ULT, which IMO doesn't have a visibility problem)
AlanSubie4Life
Efficiency Obsessed Member
I won't vouch for the calculations in this video, but the concepts are correct. The B pillar cam has a 90° FOV which is what limits the car's ability to safely do Chuck's ULT.
As I said, certainly for some highly occluded turns there could be some issue here because the car would have to stick out too far.
But Chuck’s turn has excellent visibility and is not occluded as long as the car pulls up to a safe position short of the traffic lanes. There’s tons of margin. Chuck also makes this clear in his video. It’s an excellent video (screen captures elsewhere).
Last edited:
Similar threads
- Replies
- 15
- Views
- 1K
- Replies
- 4
- Views
- 582
- Replies
- 38
- Views
- 1K
- Replies
- 12
- Views
- 825