Yes, it can tell if there is a car in your blindspot currently with ultrasonic sensors. But it can
not tell if a car is approaching rapidly from behind. Or if another car is trying to change into the same lane (until there is an impending collision)
This is AP1. Unless the car is already in your blind spot, it won't see it. It doesn't see very far back and only cars directly next to it. I have an AP1 car and I even find the ultrasonic detection to be a little unreliable, which is why you have to check your mirrors prior to a lane change even when you use automatic lane change.
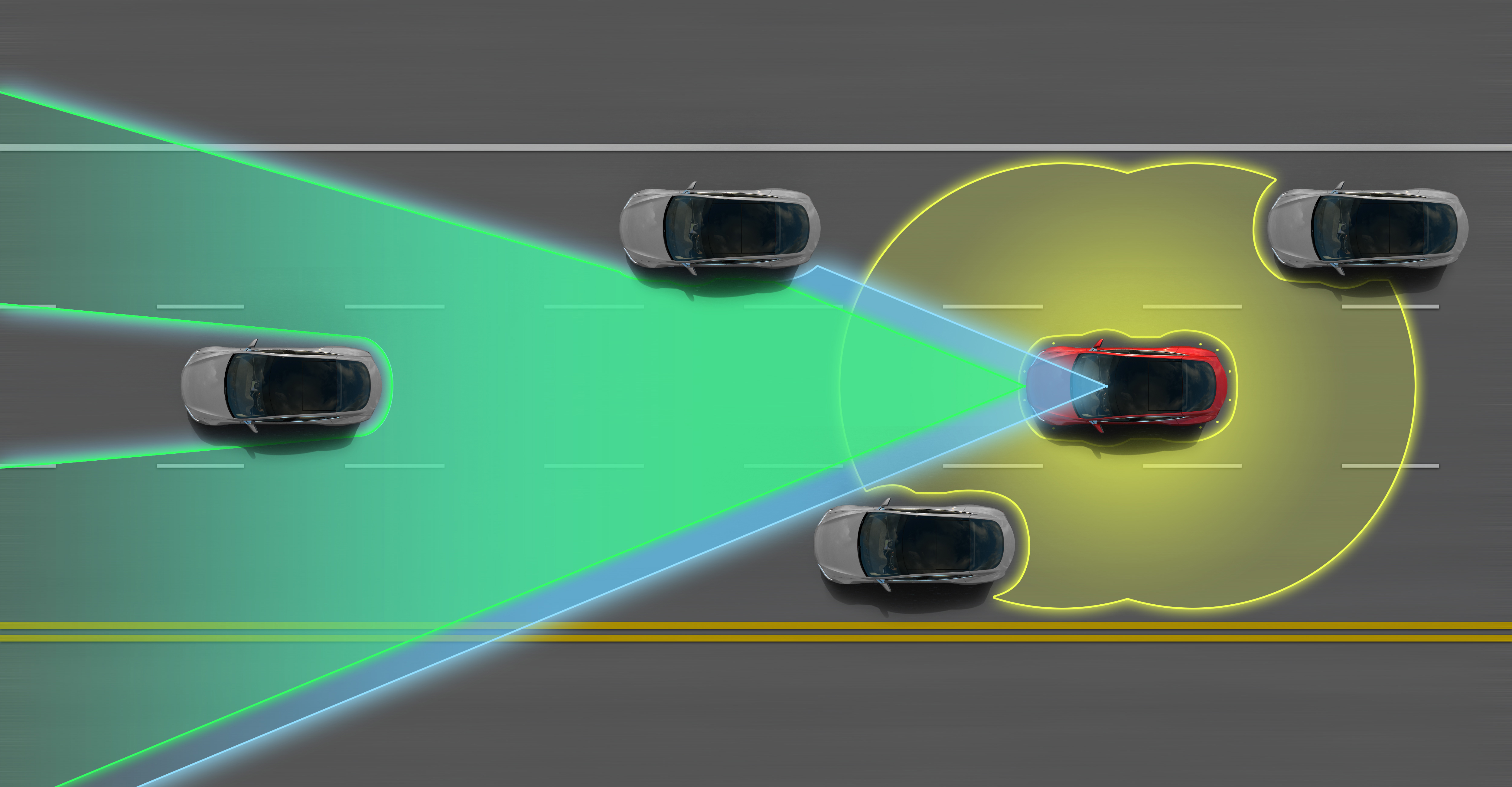
This is AP2/2.5. With this hardware suite, the car can 'see' much further, and even see whats coming up behind you. It uses computer vision, and not just ultrasonic sensors. The important ones here are the Readward Looking Side Cameras and the Rear View Camera. Also the ultrasonics can see further too with 5 meters vs 8 meters.
That's how we know AP1 won't get ULC, since the hardware is not capable of it. If you're going 65 trying to change lanes and a car is coming up from behind at 85 mph, the car is not capable of detecting that until it's already next to you and by then it's way too late.