There's a massive blind spot on the front wings that you couldn't cover (I found this out the hard way a couple of times where a car nearly took the front of the tesla off and the tesla didn't even see it, let alone warn).
You could probably do everything from the front doors backwards though as an overhead. Not sure about front as the camera there is too high up and can't really see any more than you can.
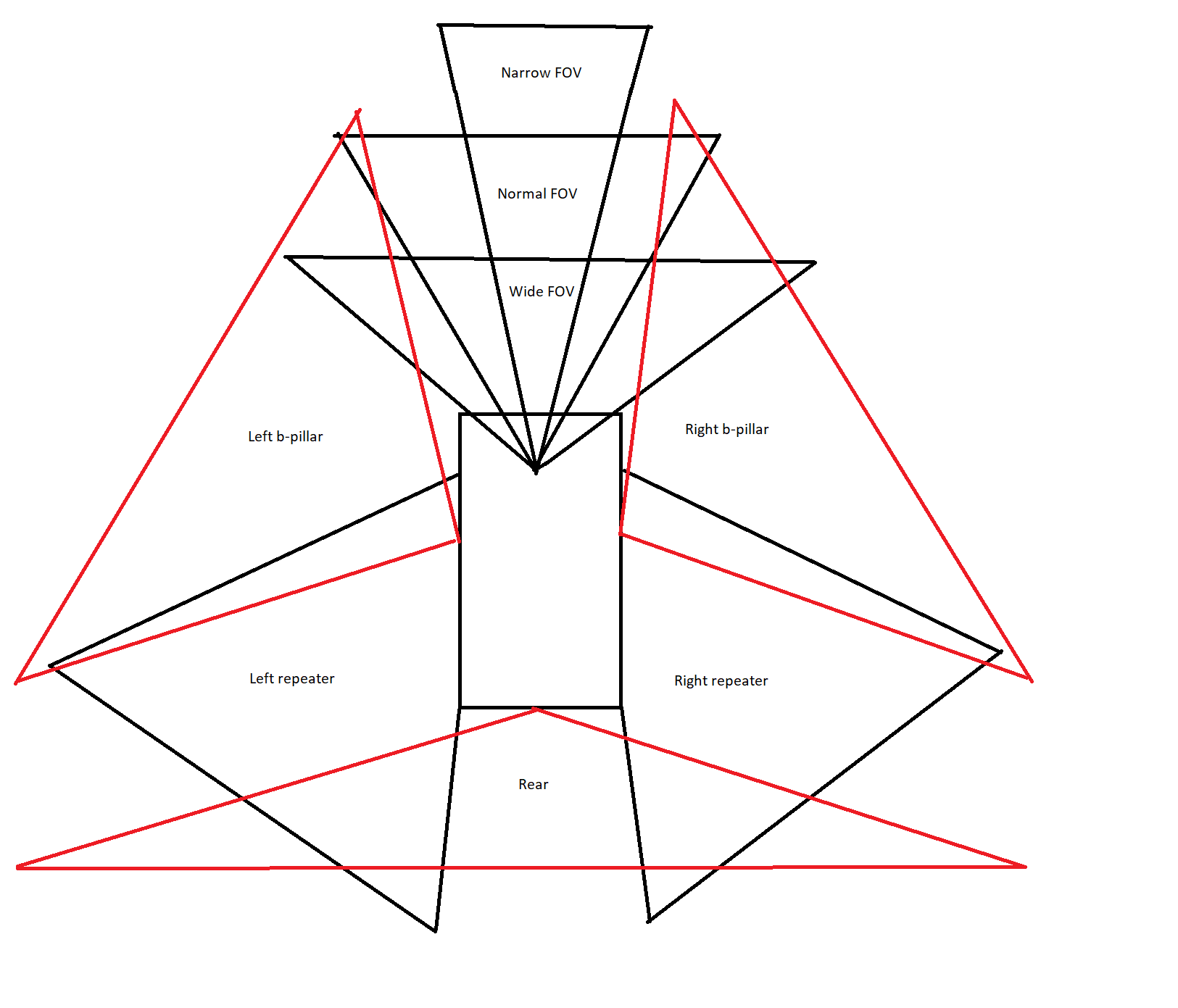
It doesn't really have any blindspots, but, it doesn't currently make use of all the cameras. The blind spot you're talking about is because the forward-facing B-pillar cameras aren't really used right now. If I recall, currently used is: Forward narrow FOV, forward normal FOV, forward wide FOV, left repeater, and right repeater. So this is missing left forward-facing, right forward-facing, and the rear camera. The gaps are helped with ultrasonic and forward-facing radar to see vehicles ahead of the one in front.
When Autopilot 2.0 (The 'core re-write') is released these should be used as part of the 3D reconstruction they plan, along with much greater usage of Autopilot hardware 3 which currently they don't use much resources on. (Talked about in the Q2 2020 earnings call as '4D' as the car is effectively guiding the car through a 3D world with the 4th dimension being time rather than current where it's '2.5D' just basing off static pictures in stereoscopic 3D, Elon compared it from looking at a picture to watching a video. Much better prediction of the world around it)
Just made this horrific Paint drawing of what cameras are and aren't used right now, it'll describe the blind spot you notice well though! (Obviously not a factual drawing or totally accurate to actual camera FOVs, but it's the 'in a nutshell' of the camera layout)
If you look at the following image, you can see how much the front wide FOV camera and b-pillar cameras overlap if they were in use: (See the road sign on the left pillar and front camera, as well as the road sign on the right side of the front camera compared to on the right pillar)