Not good news FSD development.



Welcome to Tesla Motors Club
Discuss Tesla's Model S, Model 3, Model X, Model Y, Cybertruck, Roadster and More.
Register
Install the app
How to install the app on iOS
You can install our site as a web app on your iOS device by utilizing the Add to Home Screen feature in Safari. Please see this thread for more details on this.
Note: This feature may not be available in some browsers.
-
Want to remove ads? Register an account and login to see fewer ads, and become a Supporting Member to remove almost all ads.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
FSD Beta 10.69
- Thread starter Buckminster
- Start date
thewishmaster
Active Member
This means FSD is solved and done. Not many understand this.Not good news FSD development.
")
i’ll believe it when I see itThis means FSD is solved and done. Not many understand this.
AlanSubie4Life
Efficiency Obsessed Member
10.69.2.4 is like a binky. Oral fixation of all sorts, I guess. 
Who could have predicted this outcome?
Who could have predicted this outcome?
PACEMD
Active Member
Right, I read that on Twitter. I still can't decide if 10.69.2.4 is a trick or a treat........either way it's probably pretty scary, or sad........Boo! or boo hoo hoo? You decide........This means FSD is solved and done. Not many understand this.
Last edited:
swedge
Member
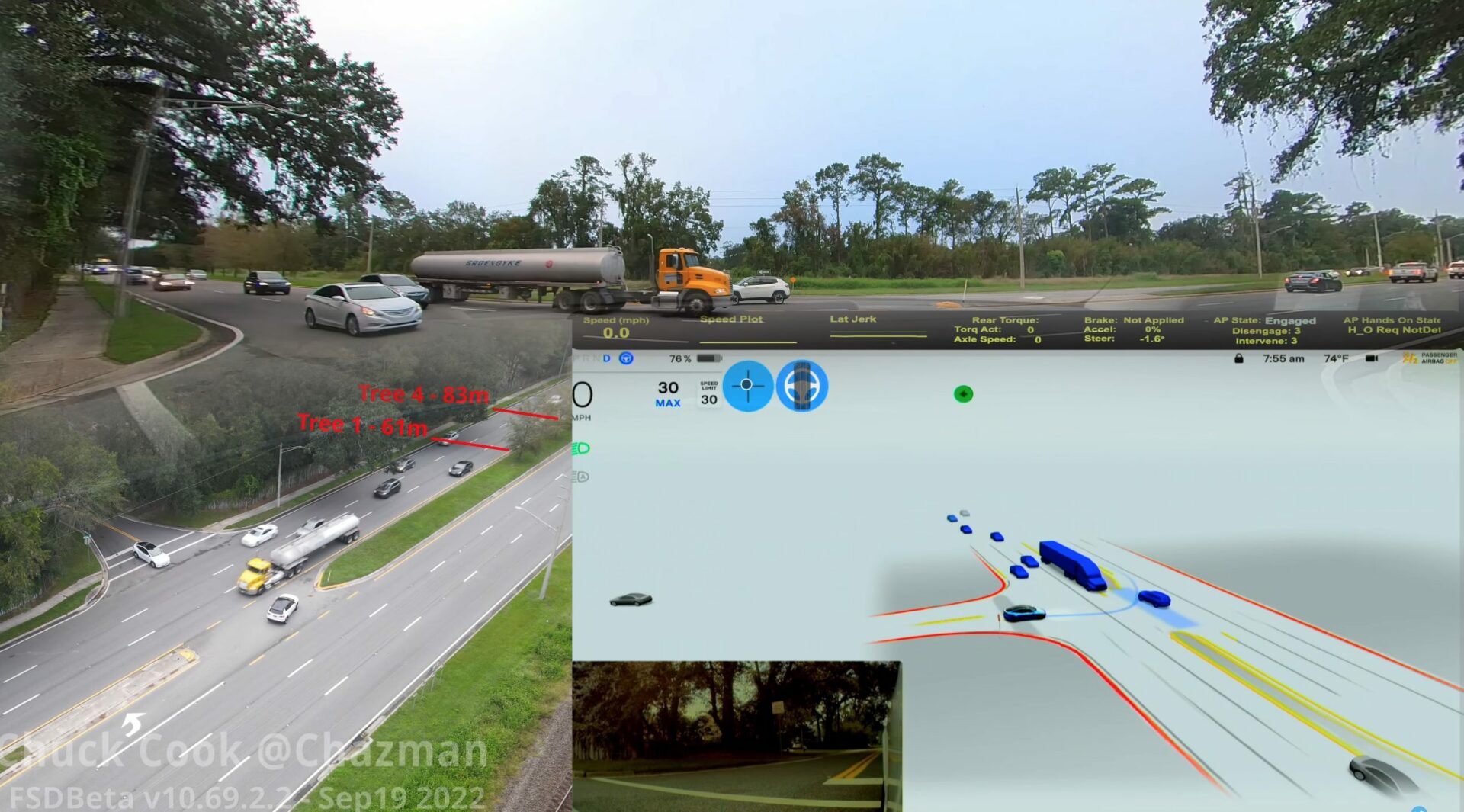
Yeah! In your video, the "tentacle" whips around like crazy, and goes grey. For very brief moment, it seems to be planing to turn hard right, out of the lane altogether. At about the same time, the navigation display changes, but I can't make out the details.Guess have to look at what the blue tentacle does in the AP case with merging lane but I would guess not similar.
It looks like car's CPU got pretty dangerously confused. Perhaps the initial bad lane position put it in a position it just couldn't resolve quickly enough.
SW
took jaunt down Hwy 290 from Austin to Houston this past weekend.
FSDb was pretty good, only a two slowdowns in 400 miles of driving.
However, it still has that fetish with the left lane. No other cars on the road and the stupid thing suddenly signals left and moves over without confirmation. So I'd signal right and it would move back on to do it again 1/2 a mile down the road...
FSDb was pretty good, only a two slowdowns in 400 miles of driving.
However, it still has that fetish with the left lane. No other cars on the road and the stupid thing suddenly signals left and moves over without confirmation. So I'd signal right and it would move back on to do it again 1/2 a mile down the road...
archae86
Member
While I had 15-minute segments without disengagement, and pretty good behavior almost all the time, FSDb did two very wrong things today. At a T intersection 3-way stop-sign in my neighborhood it reacted to a car coming in from the left by initially taking a bit wider left turn than usual. No problem. But then, with the other car already clearing out of the way, it got twitchy and slow, and nosed into the curb head-on. I disengaged without waiting to see if it would hit the curb, stop, or somehow back up. To escape, after disengagement I did back up. No danger, as there were not cars or pedestrians around to wonder what idiot was driving my car.
The second was utterly different. It was setting me up to turn left to enter the onramp to an Interstate from a messy set of about 5 lanes going my way, of which the leftmost two were going to the Interstate and had their own individual signals. My lane had a clear red arrow, but when the lane to my right (a through lane) got a green light, my car started up. I did not wait to see how that would turn out but braked hard immediately. I have not much of a guess of what it would have done had I just waited to see.
Most of the rest was good enough that I could imagine getting lulled into insufficient attention. One really must stay sharp. I personally, may be in more danger when it gets ten or a hundred times better, and my reminders of the necessity of attention become less fresh.
The second was utterly different. It was setting me up to turn left to enter the onramp to an Interstate from a messy set of about 5 lanes going my way, of which the leftmost two were going to the Interstate and had their own individual signals. My lane had a clear red arrow, but when the lane to my right (a through lane) got a green light, my car started up. I did not wait to see how that would turn out but braked hard immediately. I have not much of a guess of what it would have done had I just waited to see.
Most of the rest was good enough that I could imagine getting lulled into insufficient attention. One really must stay sharp. I personally, may be in more danger when it gets ten or a hundred times better, and my reminders of the necessity of attention become less fresh.
Looks like this vehicle is downloading 10.69.3 / 2022.36.15? TeslaFi.com Firmware TrackerThis particular "employee" vehicle tends to not update ASAP with it still on 10.69.2.2 (instead of 10.69.2.3)
FSD Beta 10.69.3 release notes
- Upgraded the Object Detection network to photon count video streams and retrained all parameters with the latest autolabeled datasets (with a special emphasis on low visibility scenarios). Improved the architecture for better accuracy and latency, higher recall of far away vehicles, lower velocity error of crossing vehicles by 20%, and improved VRU precision by 20%.
- Converted the VRU Velocity network to a two-stage network, which reduced latency and improved crossing pedestrian velocity error by 6%.
- Converted the NonVRU Attributes network to a two-stage network, which reduced latency, reduced incorrect lane assignment of crossing vehicles by 45%, and reduced incorrect parked predictions by 15%.
- Reformulated the autoregressive Vector Lanes grammar to improve precision of lanes by 9.2%, recall of lanes by 18.7%, and recall of forks by 51.1%. Includes a full network update where all components were re-trained with 3.8x the amount of data.
- Added a new "road markings" module to the Vector Lanes neural network which improves lane topology error at intersections by 38.9%.
- Upgraded the Occupancy Network to align with road surface instead of ego for improved detection stability and improved recall at hill crest.
- Reduced runtime of candidate trajectory generation by pproximately 80% and improved smoothness by distilling an expensive trajectory optimization procedure into a lightweight planner neural network.
- Improved decision making for short deadline lane changes around gores by richer modeling of the trade-off between going off-route vs trajectory required to drive through the gore region
- Reduced false slowdowns for pedestrians near crosswalk by using a better model for the kinematics of the pedestrian
- Added control for more precise object geometry as detected by general occupancy network.
- Improved control for vehicles cutting out of our desired path by better modeling of their turning / lateral maneuvers thus avoiding unnatural slowdowns
- Improved longitudinal control while offsetting around static obstacles by searching over feasible vehicle motion profiles
- Improved longitudinal control smoothness for in-lane vehicles during high relative velocity scenarios by also considering relative acceleration in the trajectory optimization
- Reduced best case object photon-to-control system latency by 26% through adaptive planner scheduling, restructuring of trajectory selection, and parallelizing perception compute. This allows us to make quicker decisions and improves reaction time.
AlanSubie4Life
Efficiency Obsessed Member
Suggests they did have this in there after all, though unclear if they do have grammar for intersections, as discussed on AI Day. Not clear it is the same thing.Reformulated the autoregressive Vector Lanes grammar to improve precision of lanes by 9.2%, recall of lanes by 18.7%, and recall of forks by 51.1%. Includes a full network update where all components were re-trained with 3.8x the amount of data.
I wonder what reaction time they can get?This allows us to make quicker decisions and improves reaction time.
The percent improvements here are sadly a bit small…only fixing fewer than half the errors!
Not sure how they did not include relative acceleration before! Could explain some behavior! Hopefully smooths things out.Improved longitudinal control smoothness for in-lane vehicles during high relative velocity scenarios by also considering relative acceleration in the trajectory optimization
momo3605
Active Member
This sounds like a new “feature”! Reading markings on the ground, hopefully left/right/straight arrows. I’m hopeful this will make a meaningful improvement to some of the tricky intersections around my area!Added a new "road markings" module to the Vector Lanes neural network which improves lane topology error at intersections by 38.9%.
Maybe I’m reading this wrong, but could this be smoother stopping and accelerating with a “lead” car? Maybe improvements to high jerk/high G friction braking?Improved longitudinal control smoothness for in-lane vehicles during high relative velocity scenarios by also considering relative acceleration in the trajectory optimization
Its amazing that they didn't include road markings in the vector lane tokens before.This sounds like a new “feature”! Reading markings on the ground, hopefully left/right/straight arrows. I’m hopeful this will make a meaningful improvement to some of the tricky intersections around my area!
I wonder if this is another case of "we don't need it".
Was there anything you liked in the release notes?Its amazing that they didn't include road markings in the vector lane tokens before.
I wonder if this is another case of "we don't need it".
willow_hiller
Well-Known Member
Its amazing that they didn't include road markings in the vector lane tokens before.
I wonder if this is another case of "we don't need it".
It's just part of Tesla's design philosophy. First, see whether the direction of a lane can be intuited from the intersection geometry. If so, then you can drive just as well with lane markings as without. But it seems like they've come to the conclusion that lane direction cannot always be intuited from intersection geometry. At least now they've developed a fallback system for cases without markings, and going forward they'll have a system that can take advantage of them when they're present.
clydeiii
Member
Probably were just building up to it…these things all take time.Its amazing that they didn't include road markings in the vector lane tokens before.
I wonder if this is another case of "we don't need it".
Lane selection when entering intersections seems to be slightly improved but turn signals still initiate late (maybe the final 100ft).
Not sure if it's new but brake pedal chatter is more noticeable when negotiating turns at busy intersections. Odd they don't use a debounce. Maybe the goal is improved system latency/closed loop feedback delay at all costs? It would get ugly if brake tail lights flickered.
Not sure if it's new but brake pedal chatter is more noticeable when negotiating turns at busy intersections. Odd they don't use a debounce. Maybe the goal is improved system latency/closed loop feedback delay at all costs? It would get ugly if brake tail lights flickered.
clydeiii
Member
I'm hoping this will help solve what I see as my biggest source of error. FSD will sometimes move into a turn lane when no turn is imminent. If it wasn't paying attention to road markings then that would help explain the problem.FSD Beta 10.69.3 release notes
- Added a new "road markings" module to the Vector Lanes neural network which improves lane topology error at intersections by 38.9%.
YNoVA
Member
2022.36.15 Tesla Update Debuts FSD Beta 10.69.3 for Employees - TeslaNorth.com
Tesla on Monday evening released its 2022.36.15 software update, which includes the anticipated Full Self-Driving (FSD) beta version 10.69.3 for employees. According to @Teslascope, this FSD beta 10.69.3 update is being released to Tesla employees in Canada and the USA, based on vehicles in its...
Looks like 10.69.3 is utilizing 2022.36.* stack. Good to hear as I'm currently on 2022.28.*
Employee rollout today, should see wide rollout next week.
Similar threads
- Article
- Replies
- 56
- Views
- 11K
- Replies
- 19
- Views
- 2K
- Replies
- 97
- Views
- 5K
- Replies
- 9
- Views
- 4K
- Replies
- 25
- Views
- 4K